オール・イン・ワン・ソリューション
コンパクトなサイズ、コストパフォーマンス、簡単なセットアップ
RoboDK API機能を含む
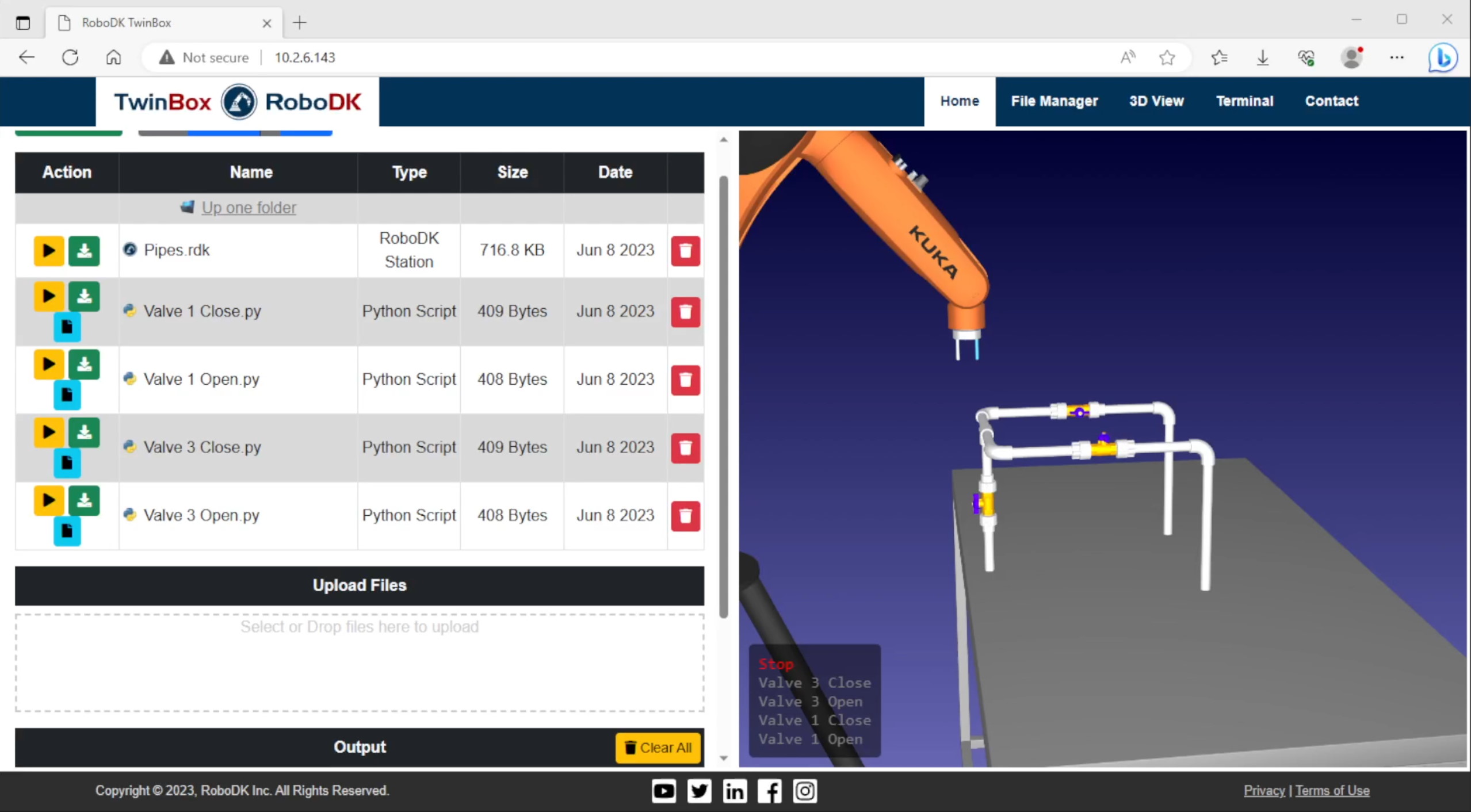
ウェブブラウザで制御
世界中どこからでもリアルタイムでアクセス可能
ロボット、デバイス、センサーの完全制御
コンパクトなサイズ、コストパフォーマンス、簡単なセットアップ
RoboDK API機能を含む
ウェブブラウザで制御
世界中どこからでもリアルタイムでアクセス可能
ロボット、デバイス、センサーの完全制御
ウェブブラウザによるリモートアクセス
省スペース:ローカルキーボード、マウス、ディスプレイが不要
カスタムデバイス(カメラ、センサーなど)の接続
複数のロボットをサポート
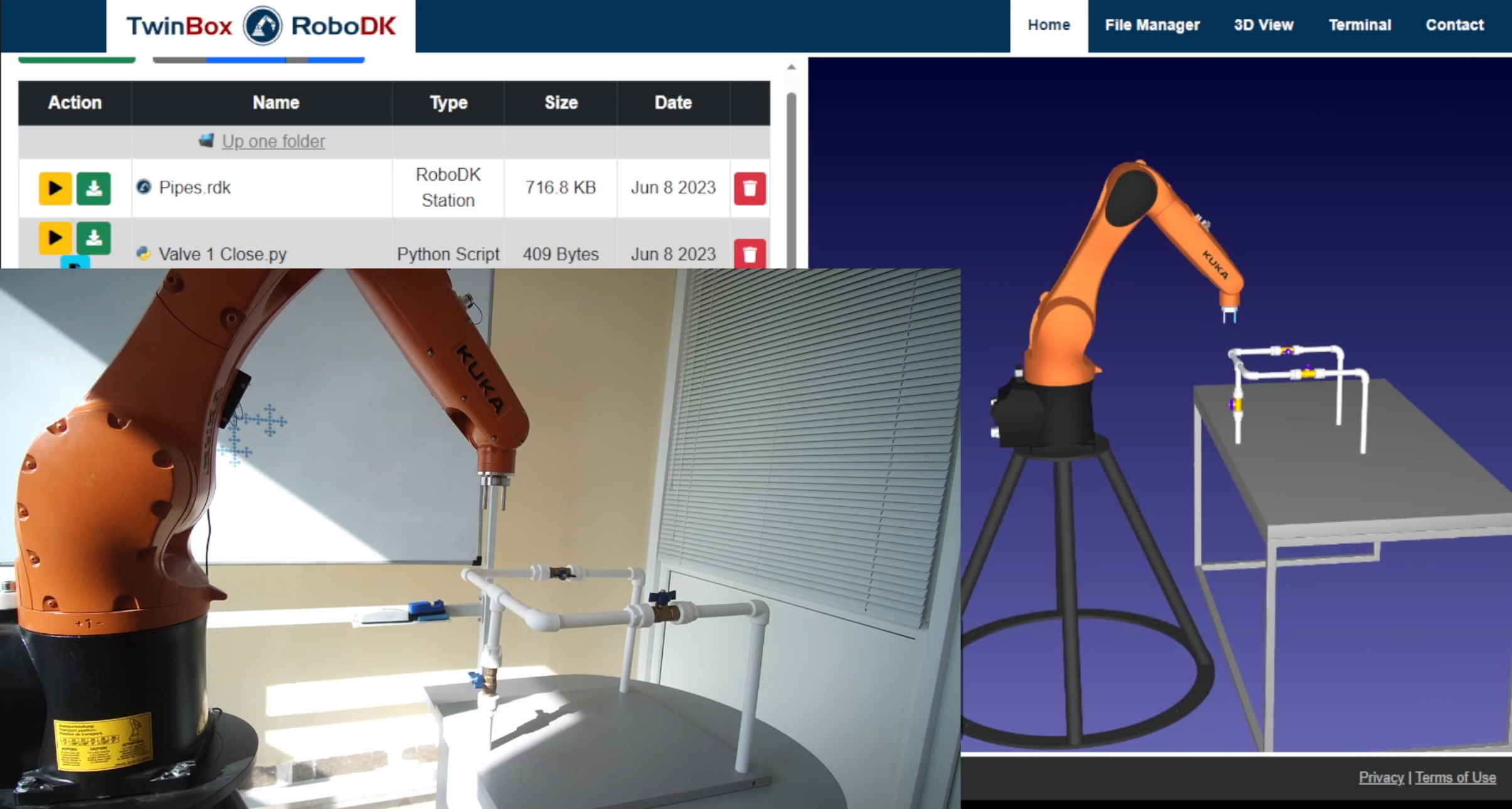
RoboDK Desktopを使ってプロジェクトを構築します。
ブラウザを使ってステーションをロードする
RoboDK TwinBoxのウェブインタフェースからロボットプログラムを実行する
必要に応じてプログラムを調整する
複数のオペレーティングシステムをサポート:Windows、Linux DebianまたはUbuntu
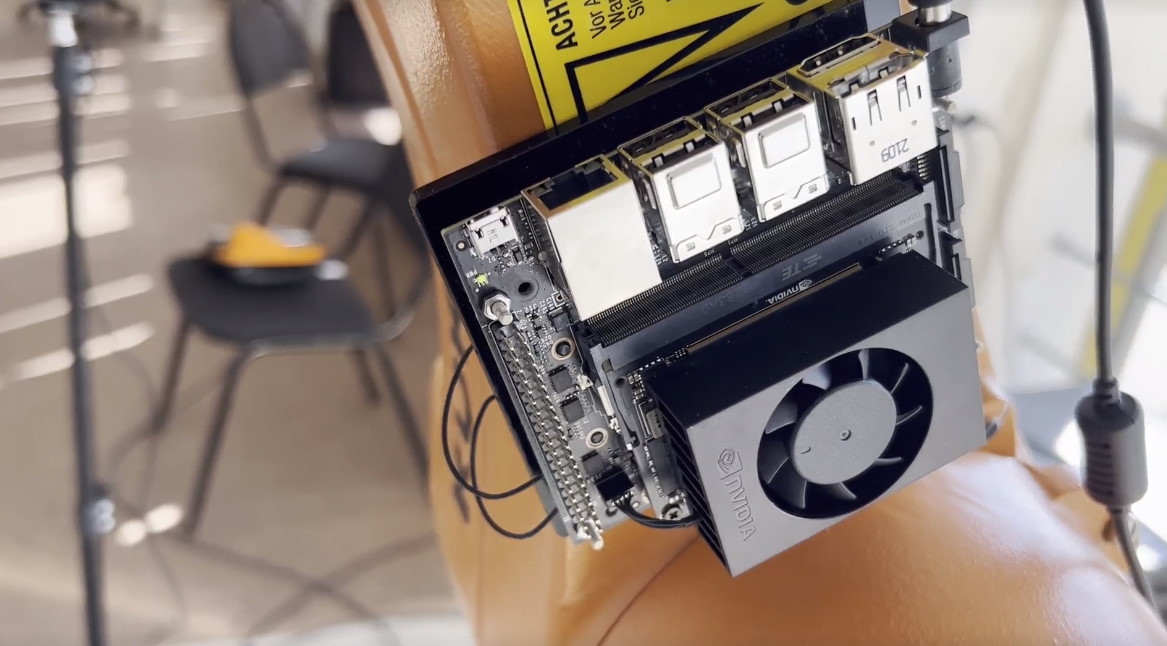
システム要件インテルx86-64プラットフォーム、ARM
専用ビルドあり:Nvidia Jetson、Raspberry Pi
数回のクリックでロボットコントローラのプログラムを作成できます。
追加軸のモデリングと同期が容易






