RoboDK CAMを使えば、あらゆるロボット加工に対応する高度なツールパスを作成し、シミュレーションすることができます。ミーリング、研磨、その他の製造アプリケーションを問わず、単純な3軸タスクから複雑な5軸加工戦略まで、簡単に適用できます。
技術的な特徴
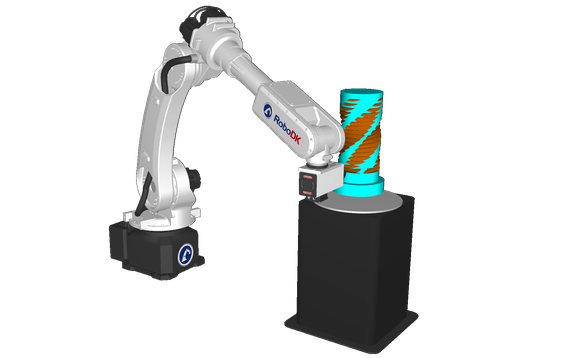
RoboDK CAMには、精度と表面の完全性を維持するための荒加工と仕上げの技術が含まれています。重い材料除去から繊細な表面改質まで、製造全体の生産性を最適化できます。
技術的な特徴
RoboDKでは、アプローチやリトラクトの動作、クリアランス平面、プロセスパラメータを完全に制御できます。安全性を高め、工具の摩耗を最小限に抑え、全体的な効率を向上させるために、あらゆる変数を微調整できます。
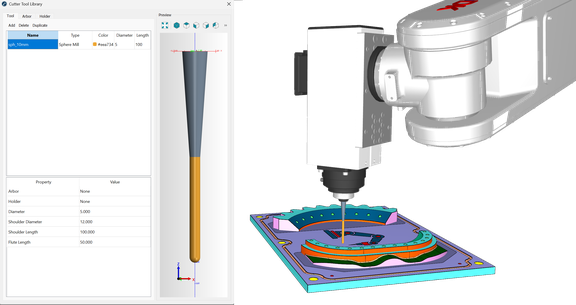
技術的な特徴
RoboDKでは、切断に使用する工具を正確に定義できるため、安定したセットアップとロボット加工環境の正確なシミュレーションが可能です。
技術的な特徴
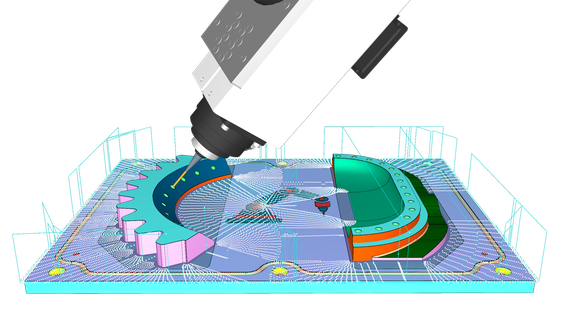
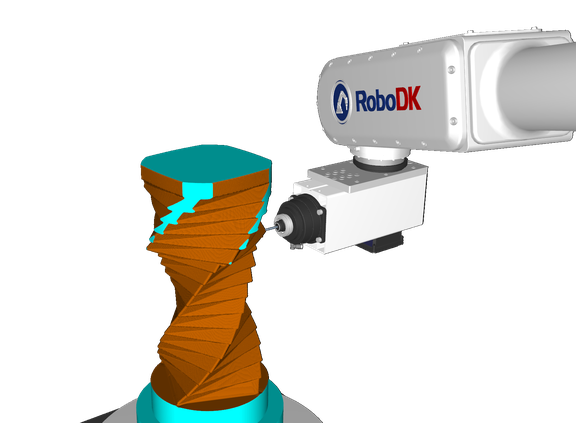
RoboDKは、複雑形状、アンダーカット、ブレンドトランジション、スプラインベースのパスを扱う高度なサーフェス加工ストラテジーをサポートしています。複雑なパーツの滑らかな仕上げを実現します。
技術的な特徴
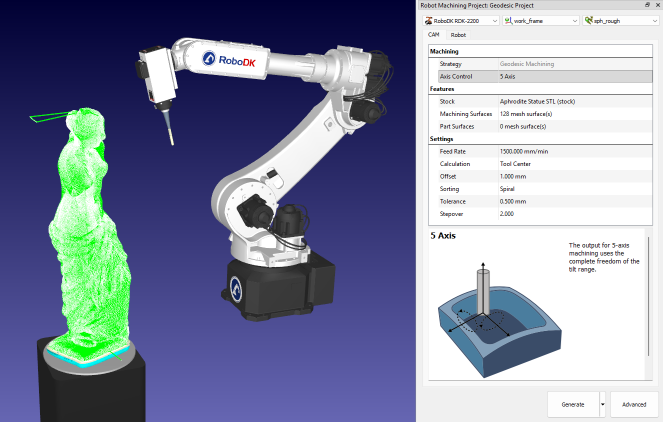
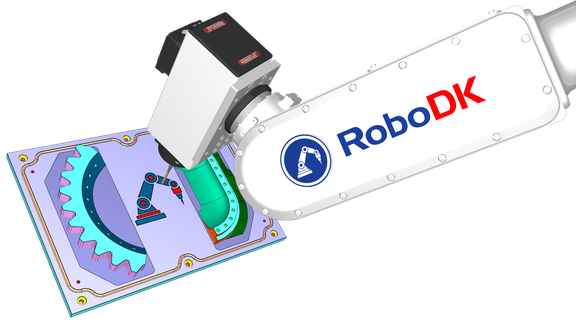
RoboDK では、ストック材を定義および追跡し、工具の最適なかみ合わせを確保できます。ジグザグパスやスパイラルパスなどの切断ストラテジーをシミュレーションすることで、無駄を削減し、工程の安定性を維持することができます。
技術的な特徴
RoboDKは、デジタルツインを迅速かつ正確に作成するために必要なすべての機能を備えています。

あらゆるロボットアームに対応したロボットシミュレーションとロボットプログラムを数分で作成できます。RoboDK ソフトウェアを使えば、ロボットアームのシミュレーションを簡単かつ正確に行うことができます。
ロボット加工や3Dプリントなどの製造アプリケーションにロボットを使用します。GコードやAPT-CLSなどの5軸CNCプログラムをシミュレートし、ロボットコントローラ用に変換します。
あらゆるロボットコントローラに対応したロボットプログラムをオフラインで簡単に生成できます。もうベンダー固有のプログラミングを学ぶ必要はありません。
STL、STEP、IGESなどのフォーマットで3Dモデルをインポートし、デジタルツインを正確に作成できます。
RoboDK ポストプロセッサは、ABB RAPID (mod/prg), Fanuc (LS/TP), KUKA KRC (SRC), Motoman Inform (JBI), Universal Robots (URP/script) など、多くのロボットコントローラに対応しています!
ロボットのリーチャビリティを拡張するために、外部軸を持つロボットを簡単に統合し、シミュレーションできます。
ロボットアームのキャリブレーションを行い、0.100 mmまでの精度を向上させます。RoboDKソフトウェアは、シミュレーションとキャリブレーションのすべての機能を1つのソリューションに統合しています。
デジタルツインをオフラインで簡単に作成し、ロボットが特異点、軸限界、衝突を通過するのを防ぎます。
Python、C#、C++などの最新のプログラミング言語を使ってロボットプログラムを作成できます。ソフトウェア開発者は簡単にインターフェースをカスタマイズできます。
RoboDKはお客様の様々な成功事例に関わってきました。