溶接
RoboDK は、ロボット溶接作業のオフラインプログラミングを合理化します。仮想環境で溶接経路をシミュレートすることで、複雑な溶接継手のロボット軌道を現場に導入する前に最適化することができます。このプロアクティブ・アプローチは、プロセスの早い段階で衝突や到達限界などの潜在的な問題を特定するのに役立ちます。例えば、自動車産業では、車体組立用の溶接ロボットをオフラインでプログラミングすることで、より効率的な生産計画とダウンタイムの削減につながります。
さらに詳しく 溶接についてRoboDKは、バーチャル試運転のためのオールインワンソフトウェアソリューションで、ロボット工学のデジタル変革を推進します。ロボットのプログラミングワークフローをデジタルツインでテスト、最適化、検証し、シンギュラリティ、衝突、到達性の問題を防ぎます。
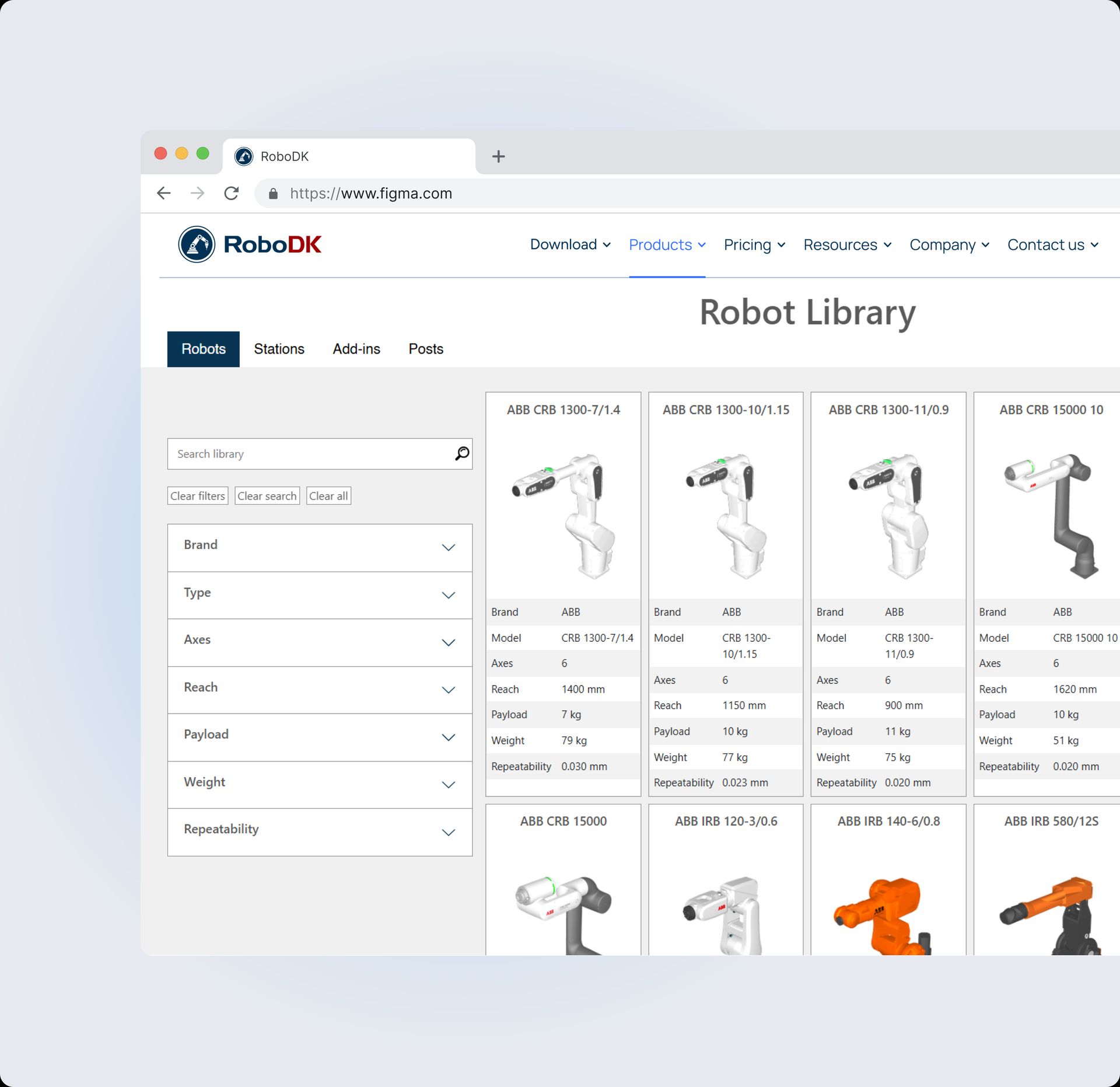
ロボットにとらわれないライブラリは、幅広いロボット、外部軸(リニアレール、ロータリーテーブル、ポジショナー)、コンポーネント間の同期をサポートします。RoboDKは、マルチロボットステーションなどの複雑なセットアップにおいて、CADからパスへの統合を可能にします。
RoboDKは多くの3次元CADファイル形式(STEP、IGES、OBJ、STLなど)やロボット加工用のCAMファイル形式(NC、APT、Gコードなど)をサポートしています。
RoboDKはセットアップにかかる時間とリスクを最小限に抑え、CAPEXを削減すると同時に、スムーズで信頼性の高い導入を実現します。RoboDKのロボティクス・シミュレーション・ソフトウェアで、オートメーションの効率を最適化し、インダストリー4.0のイノベーションを推進しましょう。

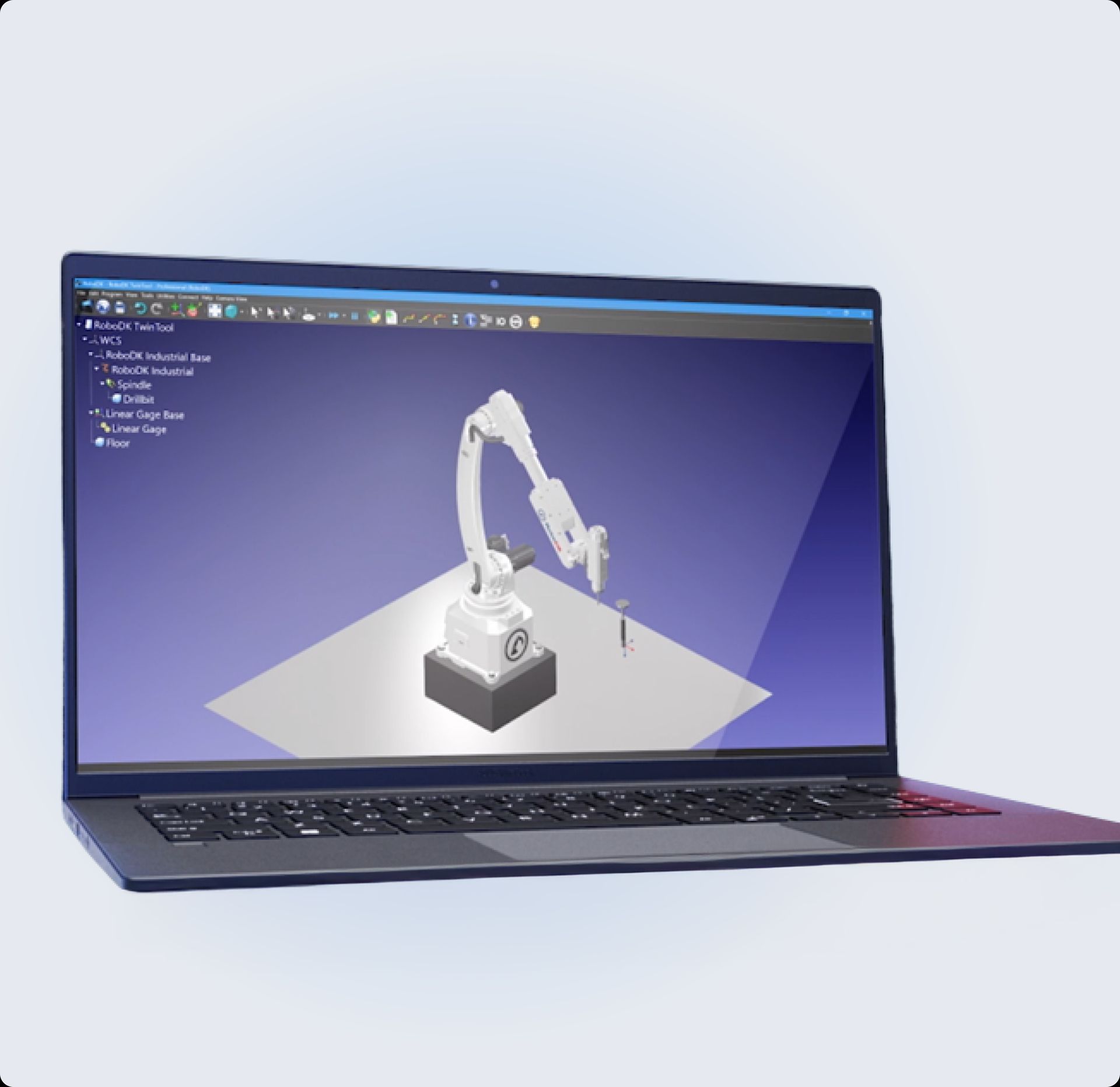
RoboDKは、可能な限り正確なロボットシミュレーションを作成するための様々な機能を提供しています。

あらゆる産業用ロボットのロボットシミュレーションやロボットプログラムをわずか数分で簡単に作成できます。RoboDKは、仮想環境でロボットアプリケーションのシミュレーションを可能にし、精度の高いロボットシミュレーションソフトウェアを提供します。
ロボットアームを5軸フライス盤(CNC)や3Dプリンタのように使用する。NCプログラムをシミュレーションし、ロボットプログラムに変換します。CAMファイル、マシンコード、ツールパス、Gコード、APT-CLSファイルの後処理。
あらゆるロボットコントローラに対応したロボットプログラムをオフラインで簡単に生成できます。RoboDKによるロボットプログラム生成により、ベンダー固有のプログラミングを学ぶ必要がなくなります。
STL、STEP、IGESなどのフォーマットで3Dモデルをインポートし、Digital Twinでシミュレーションできます。
ロボットシミュレーションでオブジェクトの相互作用を簡単に定義し、衝突を防止します。
RoboDK ポストプロセッサは、ABB RAPID (mod/prg), Fanuc LS (LS/TP), KUKA KRC/IIWA (SRC/java), Motoman Inform (JBI), Universal Robots (URP/script) など、多くのロボットコントローラをサポートしています!
外部軸を統合してロボットのリーチャビリティを拡張する。
RoboDK の高度なキャリブレーションツールを使用してロボットアームやロボットツールをキャリブレーションし、精度を向上させます。
より高度なユーザーは、Python、C#、Visual Basic、C++、またはMatlabを使用してロボットプログラムを作成できます。
RoboDKを使えば、ロボットアームを使ってあらゆる製造アプリケーションを自動化することができます。
RoboDKはお客様の様々な成功事例に関わってきました。
RoboDKは、産業用ロボットをプログラミングするためのロボットシミュレーションソフトウェアとして、新興企業から世界的大企業まで幅広く利用されています。
















