

Schweißen
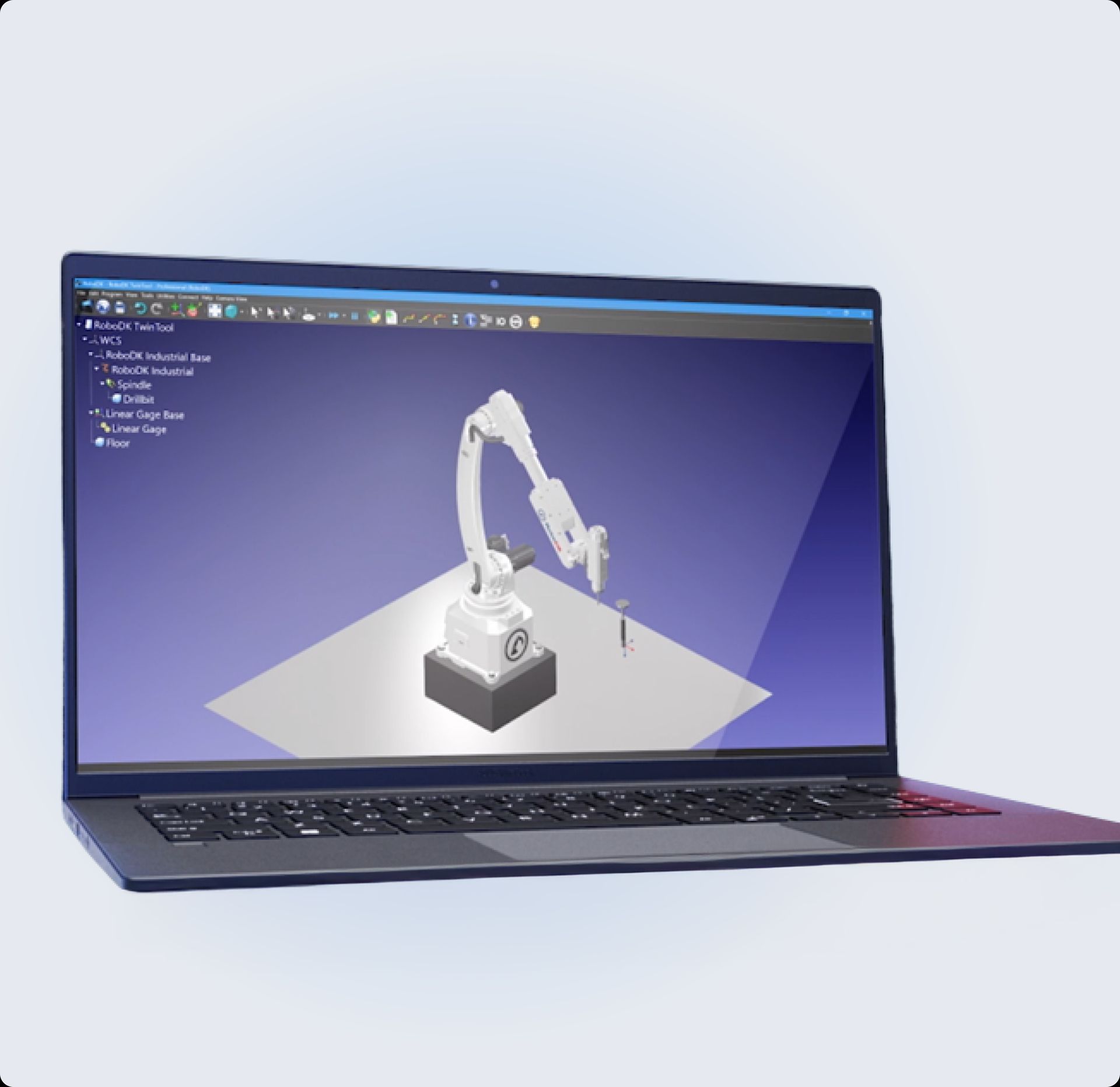
RoboDK rationalisiert die Offline-Programmierung von Roboterschweißvorgängen. Durch die Simulation von Schweißpfaden in einer virtuellen Umgebung können Sie die Robotertrajektorien für komplexe Schweißverbindungen optimieren, bevor Sie sie in der Werkstatt umsetzen. Dieser proaktive Ansatz hilft, potenzielle Probleme wie Kollisionen oder Reichweitenbeschränkungen frühzeitig zu erkennen. In der Automobilindustrie zum Beispiel kann die Offline-Programmierung von Schweißrobotern für die Karosseriemontage zu einer effizienteren Produktionsplanung und geringeren Ausfallzeiten führen.
Mehr erfahren über das Schweißen















