

용접
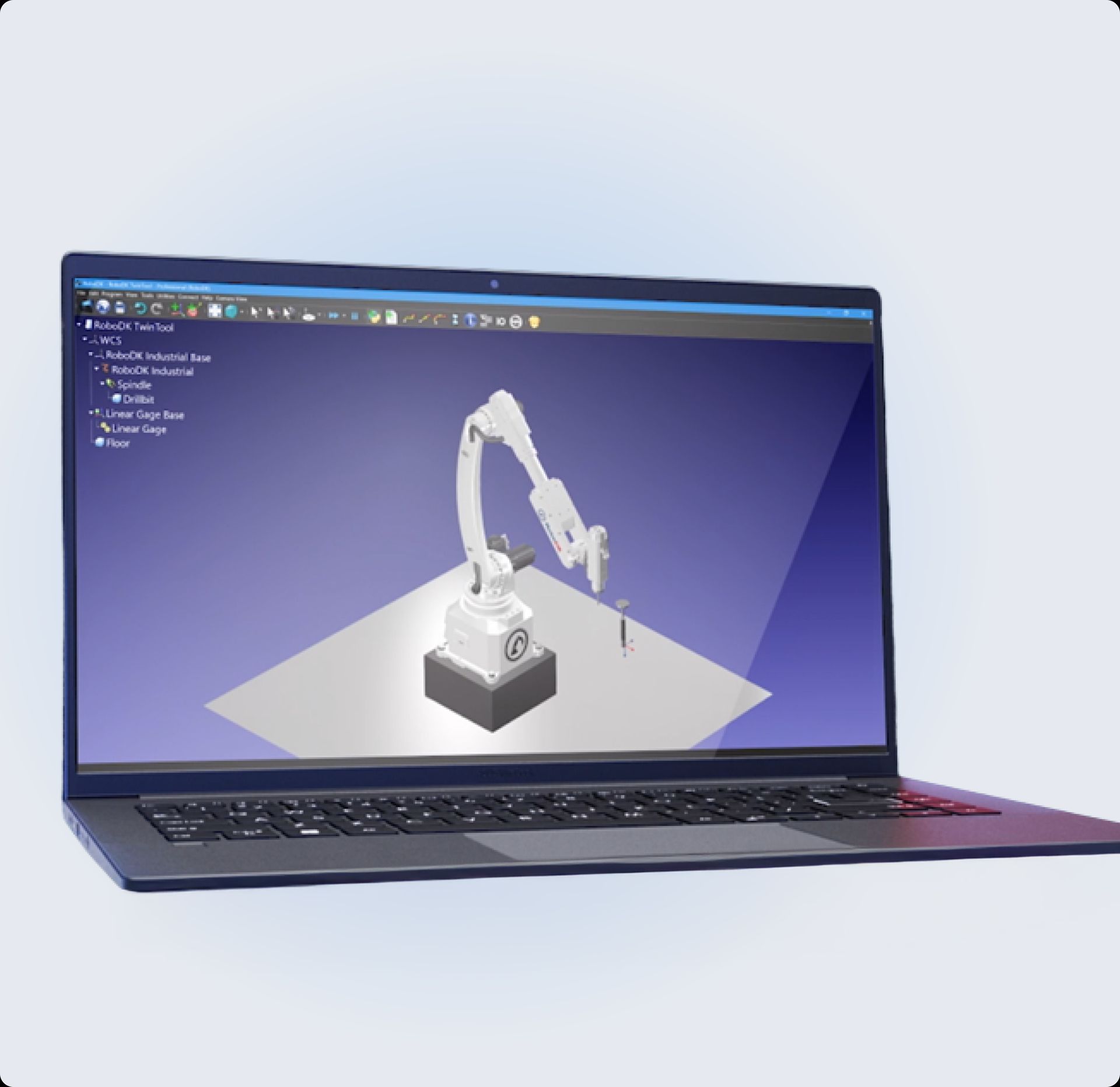
RoboDK는 로봇 용접 작업의 오프라인 프로그래밍을 간소화합니다. 가상 환경에서 용접 경로를 시뮬레이션하여 작업 현장에서 구현하기 전에 복잡한 용접 조인트에 대한 로봇 궤적을 최적화할 수 있습니다. 이러한 사전 예방적 접근 방식은 충돌이나 한계 도달과 같은 잠재적 문제를 프로세스 초기에 파악하는 데 도움이 됩니다. 예를 들어 자동차 산업에서는 차체 조립용 용접 로봇의 오프라인 프로그래밍을 통해 보다 효율적인 생산 계획을 수립하고 가동 중단 시간을 줄일 수 있습니다.
자세히 알아보기 용접 정보















