Soluzione all-in-one
Dimensioni compatte, convenienza e facilità di installazione
Funzionalità API di RoboDK incluse
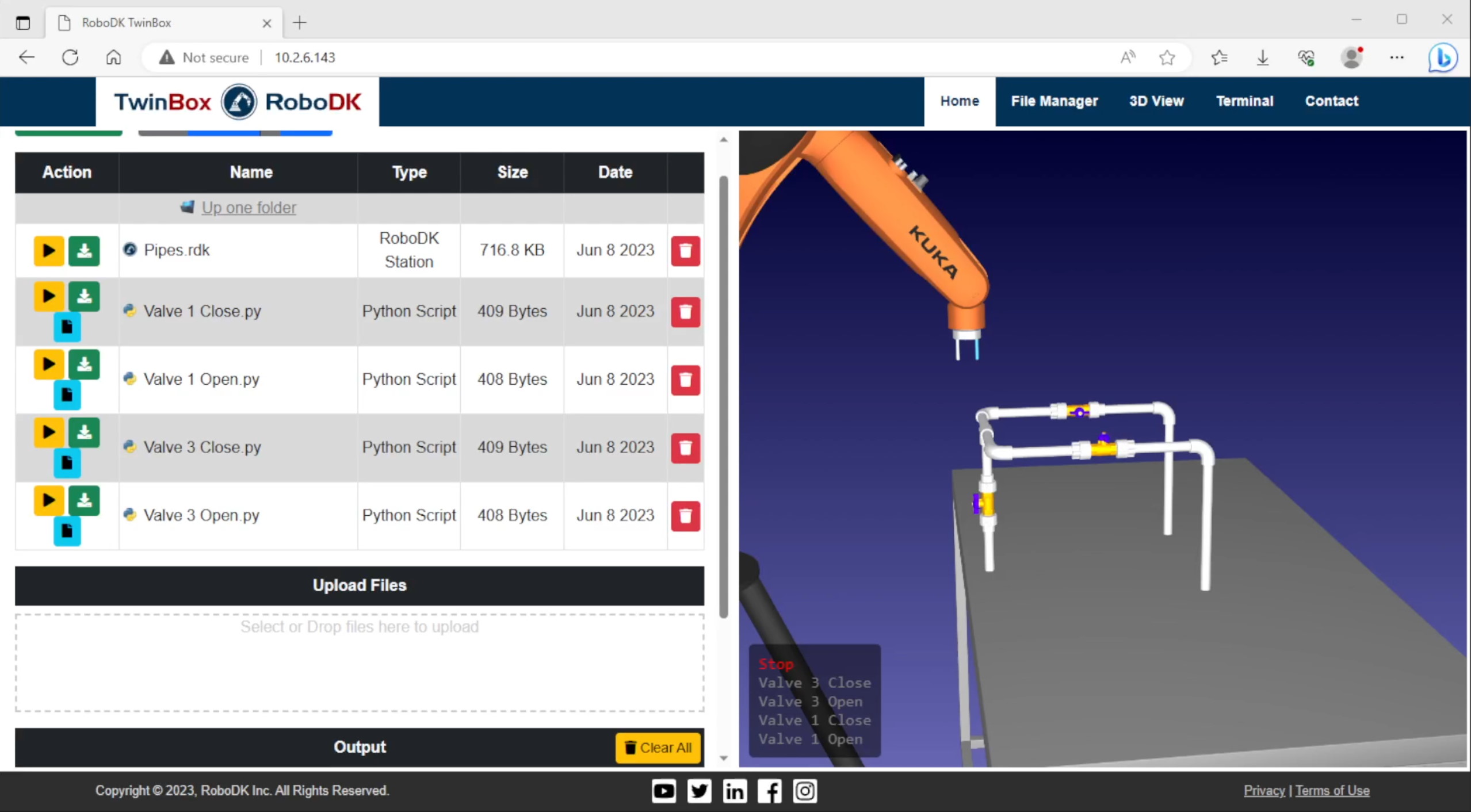
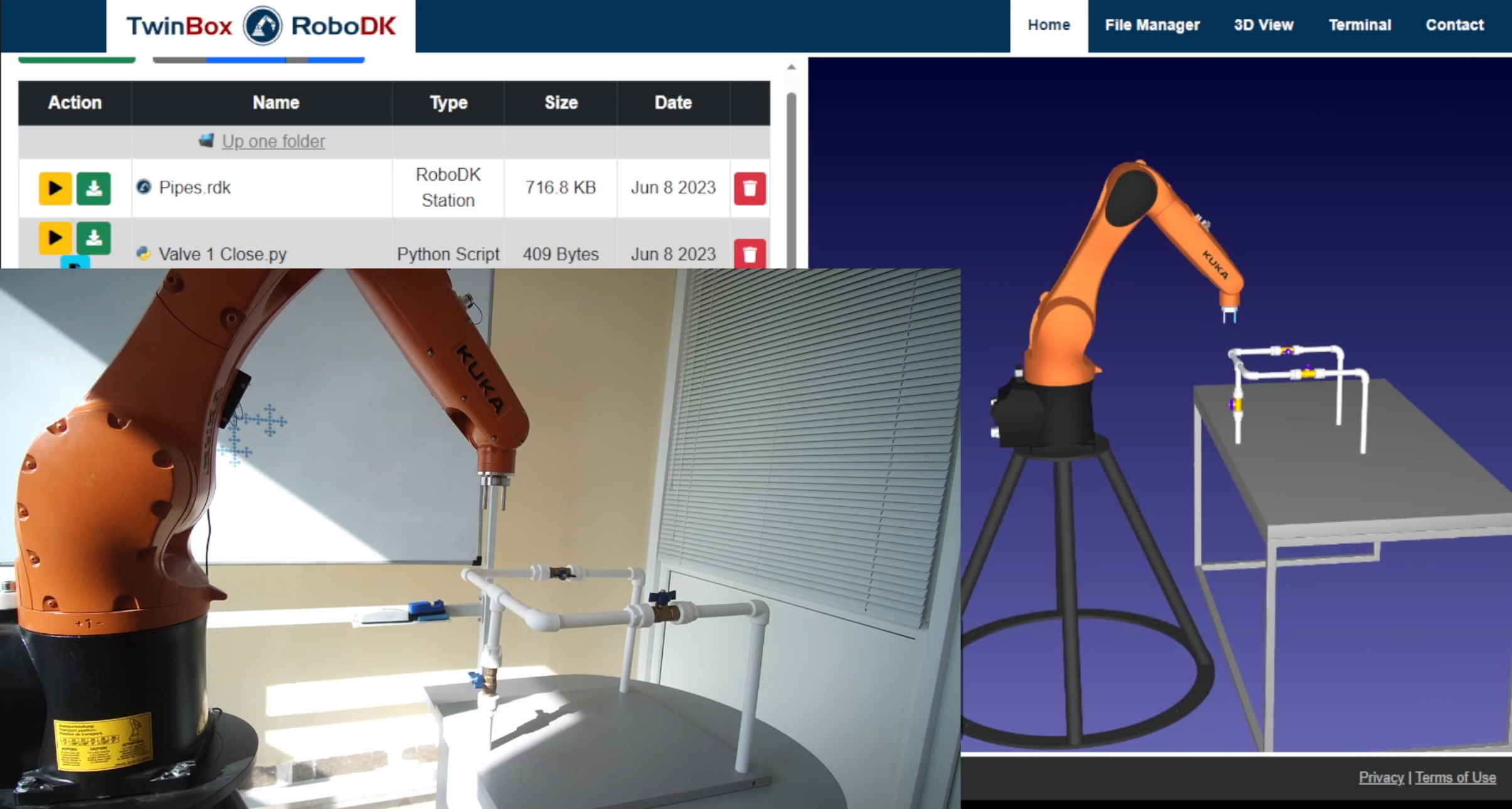
Controllo tramite browser web
Accesso in tempo reale da qualsiasi parte del mondo
Controllo completo su robot, dispositivi e sensori
Dimensioni compatte, convenienza e facilità di installazione
Funzionalità API di RoboDK incluse
Controllo tramite browser web
Accesso in tempo reale da qualsiasi parte del mondo
Controllo completo su robot, dispositivi e sensori
Accesso remoto tramite browser web
Efficiente dal punto di vista dello spazio: Non è necessario disporre di una tastiera, di un mouse o di un display locali.
Collegare dispositivi personalizzati (telecamere, sensori, ...)
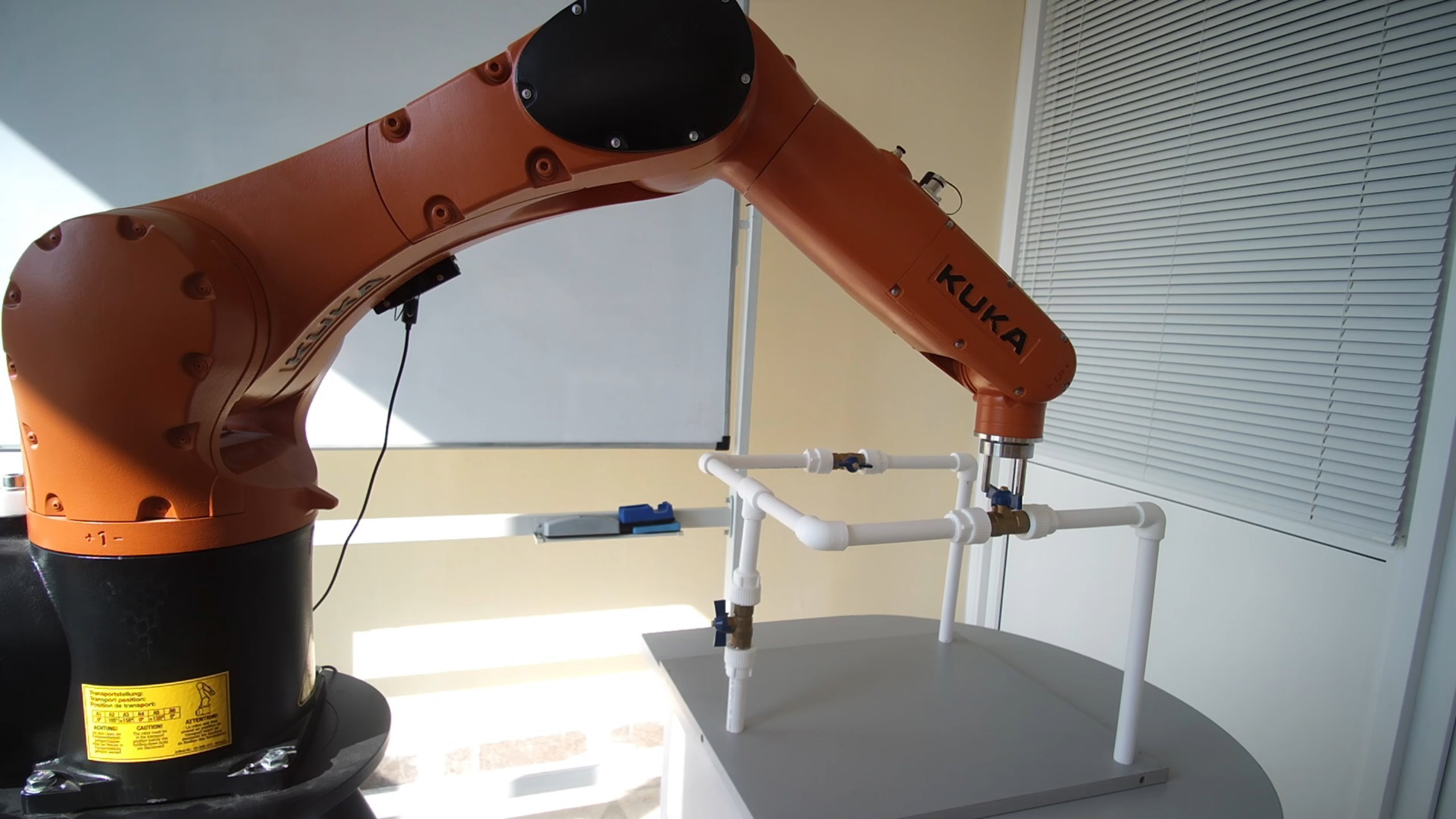
Supporto per più robot
Costruire il progetto con RoboDK Desktop
Caricare la stazione con il browser
Esecuzione del programma del robot tramite l'interfaccia web di RoboDK TwinBox
Se necessario, regolare il programma
Supporto di più sistemi operativi: Windows, Linux Debian o Ubuntu
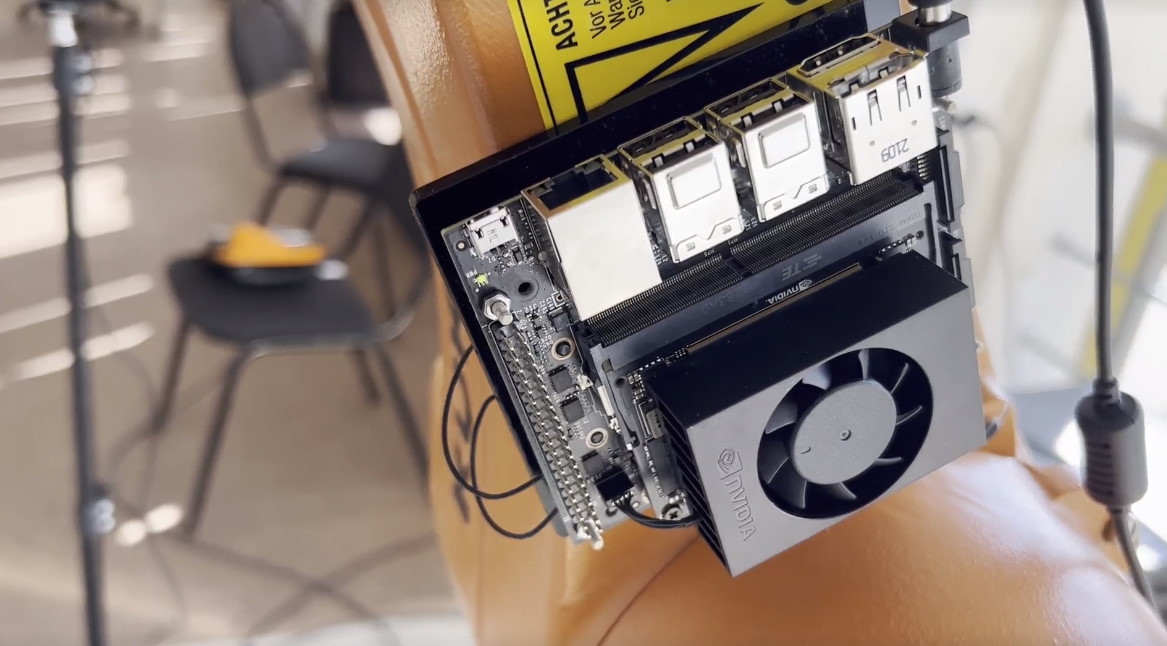
Requisiti di sistema: Piattaforme Intel x86-64, ARM
Disponibili build dedicate: Nvidia Jetson, Raspberry Pi
Generare programmi per il controller del robot con pochi clic
Modellare e sincronizzare facilmente assi aggiuntivi






