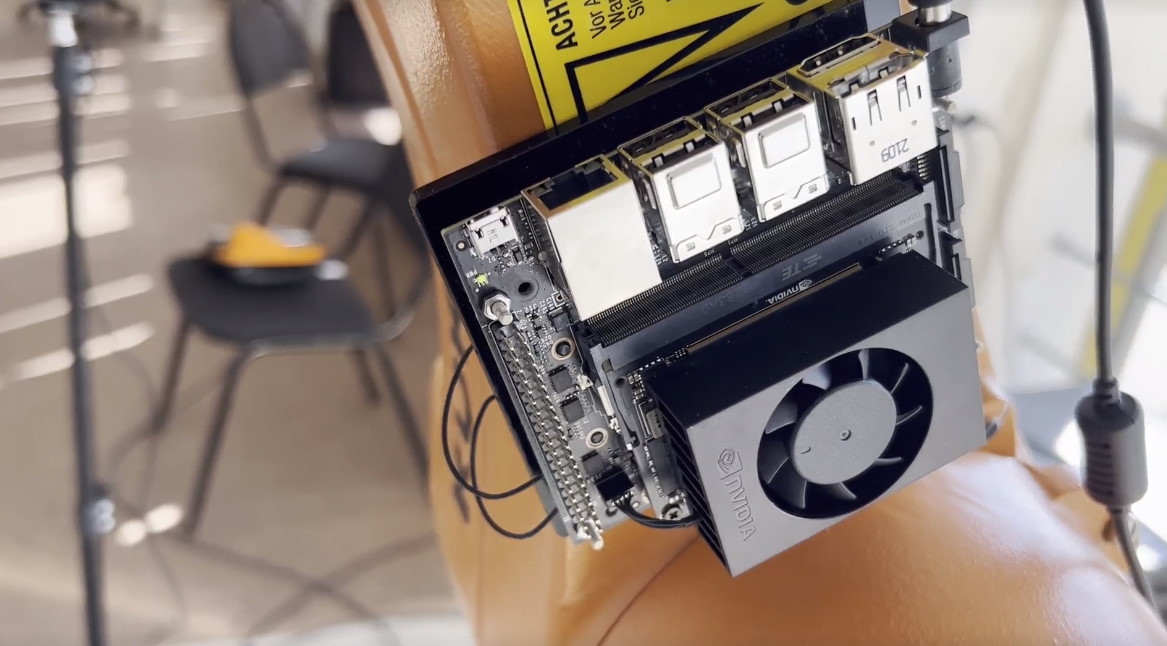
Une solution tout-en-un
Taille compacte, rentabilité, facilité d'installation
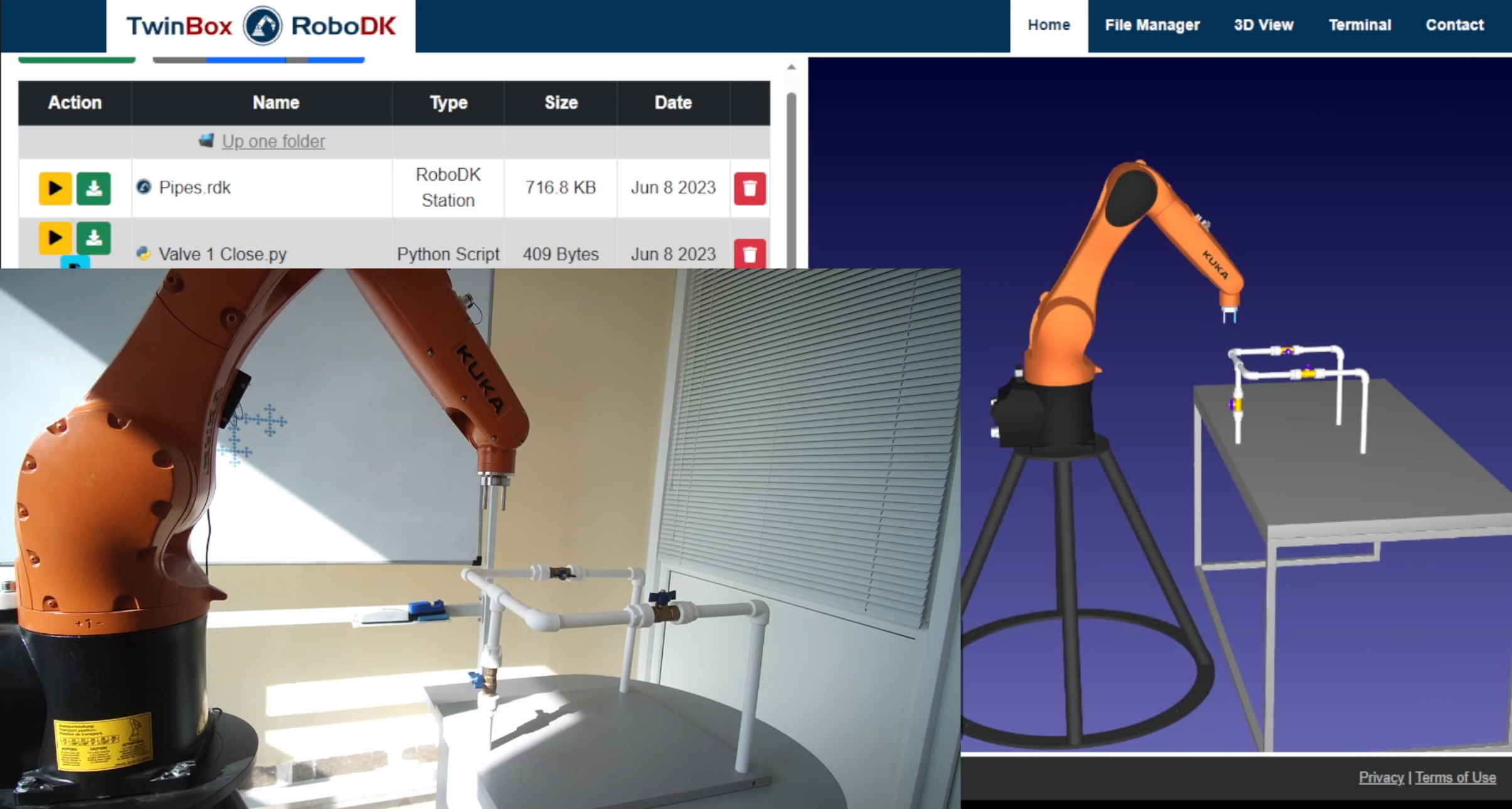
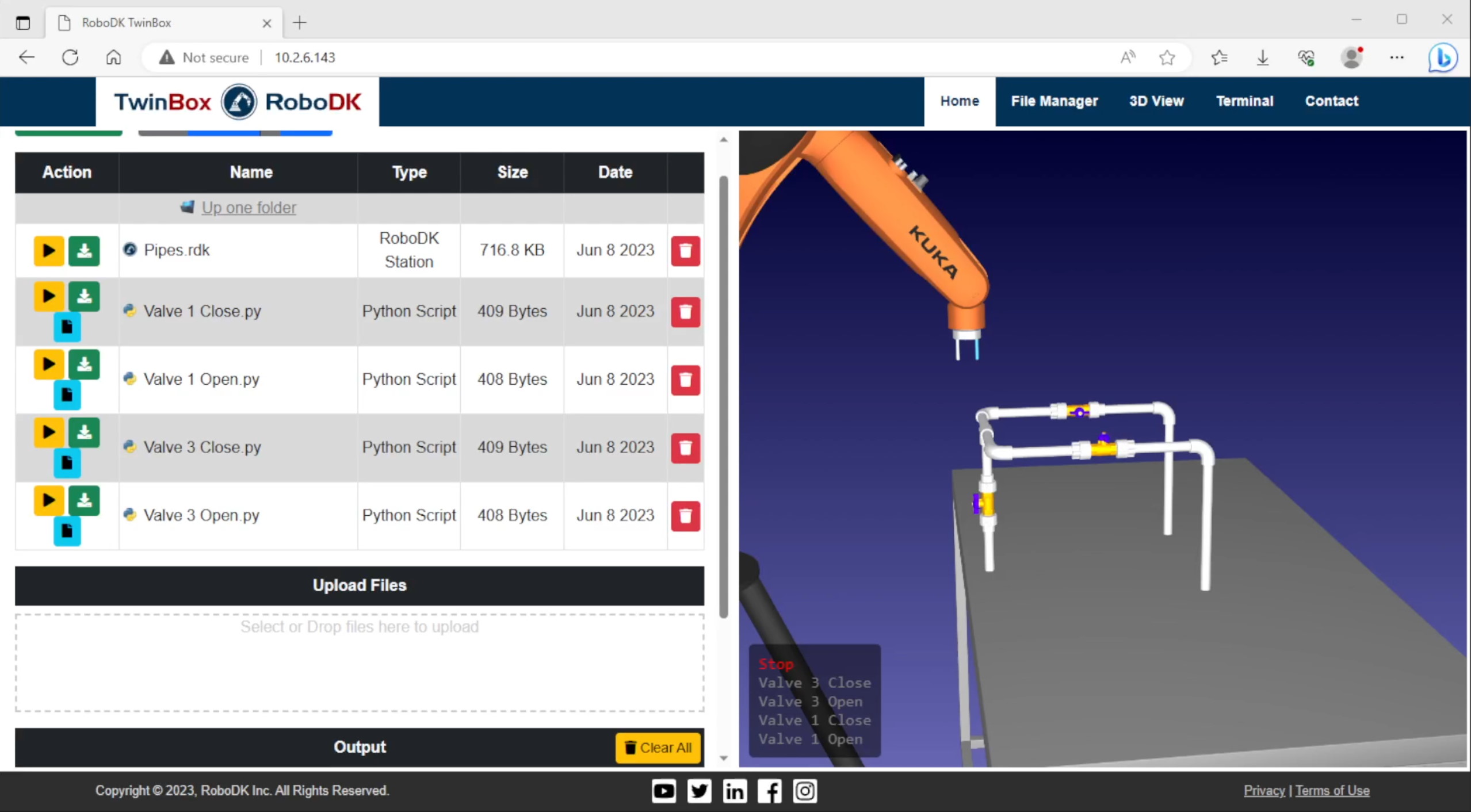
Fonctionnalités de l'API RoboDK incluses
Contrôlé par un navigateur web
Accès en temps réel depuis n'importe quel endroit du monde
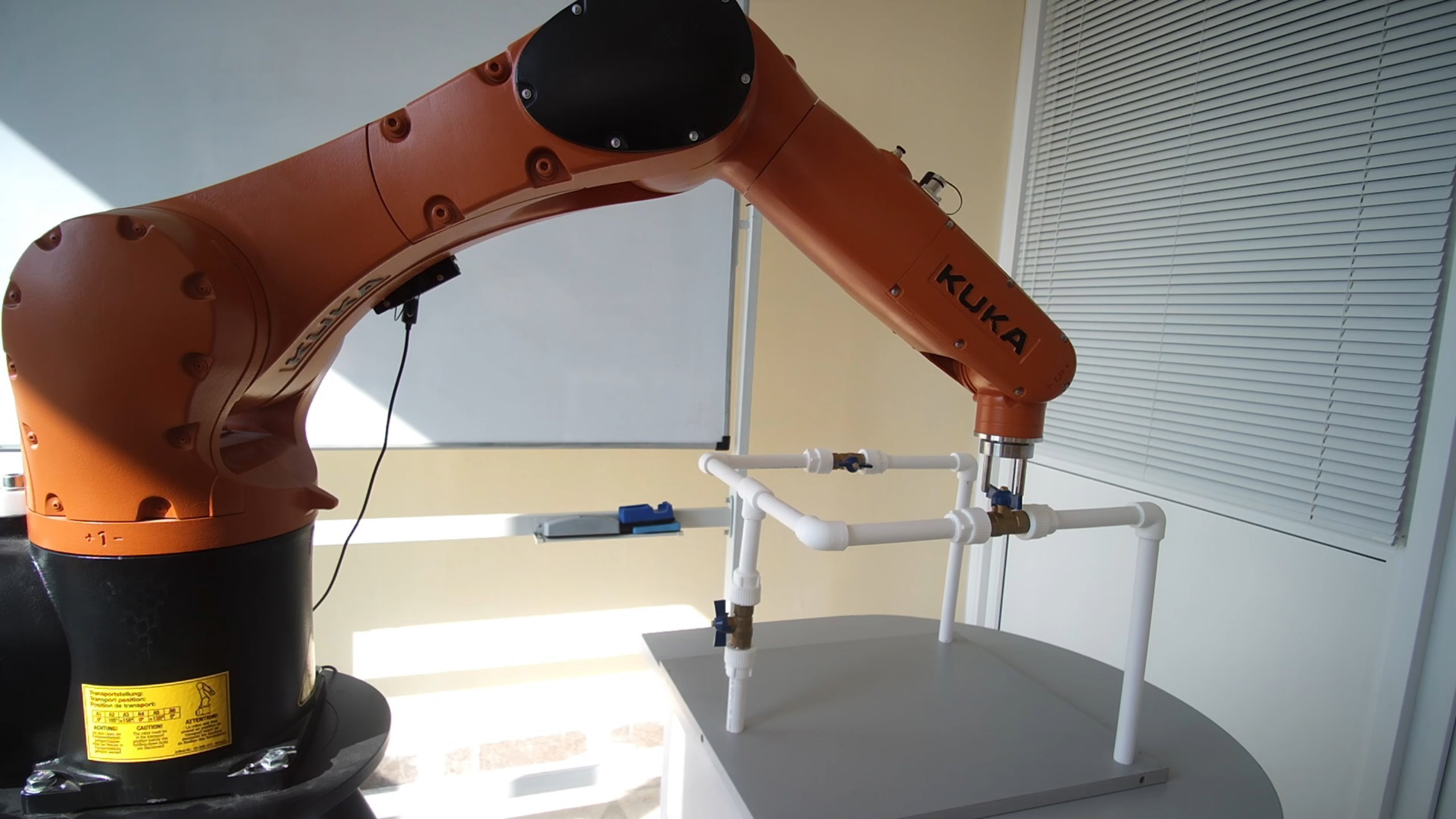
Contrôle total sur les robots, les appareils et les capteurs