
Le logiciel RoboDK permet de réduire de 95 % le temps de lavage des avions
Wilder Systems utilise les fonctions de programmation de robots de RoboDK pour le lavage automatisé d'avions. Ils ont conçu le premier système de lavage robotisé "drive-through" en utilisant un avion F-16 et deux robots Fanuc.

Usinage robotisé pour une précision sculpturale
Découvrez comment RoboDK a permis à des artistes comme Neoset Designs d'utiliser l'usinage robotique pour créer des sculptures complexes et précises avec une efficacité inégalée.
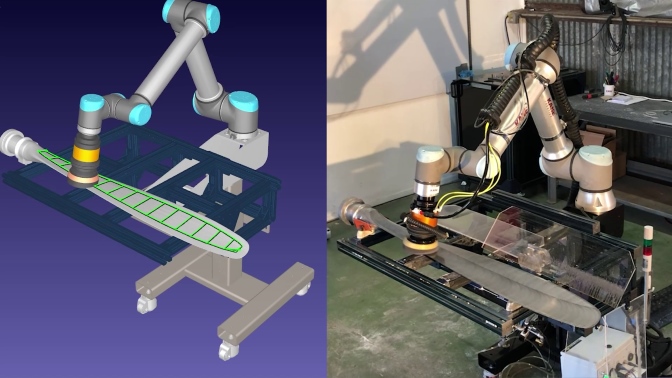
Polissage orbital avec RoboDK
Kane Robotics a utilisé RoboDK pour automatiser le polissage orbital robotisé, obtenant ainsi une finition de surface impeccable avec une précision et une efficacité inégalées.

La NASA utilise RoboDK pour l'inspection de plusieurs robots
La NASA a permis l'inspection par deux robots avec RoboDK, améliorant ainsi l'efficacité et la précision des processus de contrôle de la qualité.
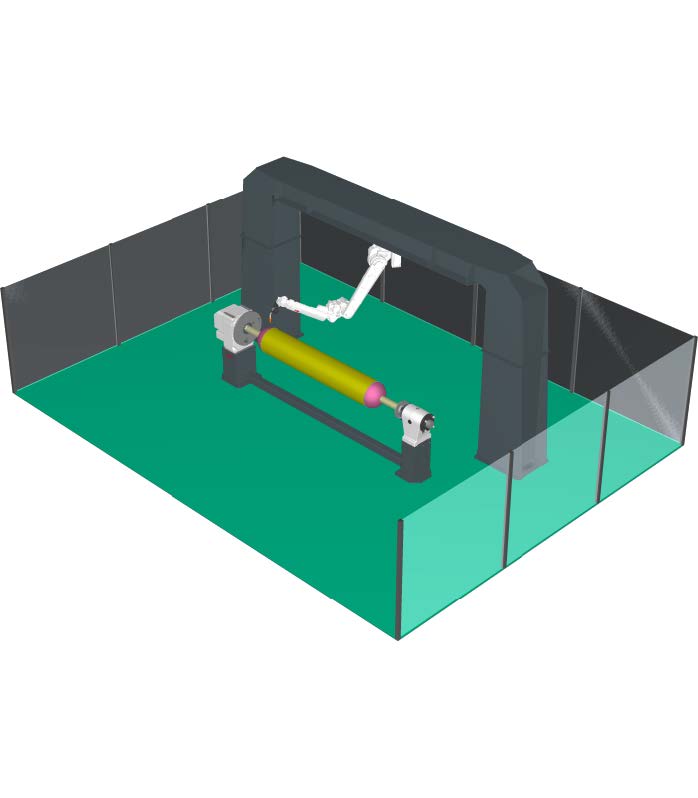
Soudage robotisé avec des axes externes
RoboDK simplifie l'automatisation du soudage robotisé, en synchronisant les robots et les positionneurs de soudage afin d'optimiser les flux de travail de soudage automatisés.

Peinture robotisée avec intégration API personnalisée
RoboDK permet une peinture robotisée précise grâce à des applications innovantes, telles que la création de portraits instantanés avec une précision robotique et la prise en charge de processus de peinture entièrement automatisés, 24 heures sur 24 et 7 jours sur 7, sans intervention humaine.