
El software RoboDK ayuda a reducir el tiempo de lavado de los aviones en un 95
Wilder Systems utiliza las funciones de programación de robots de RoboDK para el lavado automático de aviones. Diseñaron el primer sistema de lavado robotizado "drive-through" utilizando un avión F-16 y dos robots Fanuc.

Mecanizado robotizado de precisión escultórica
Descubra cómo RoboDK ha permitido a artistas como Neoset Designs utilizar el mecanizado robótico para crear esculturas complejas y precisas con una eficacia sin precedentes.
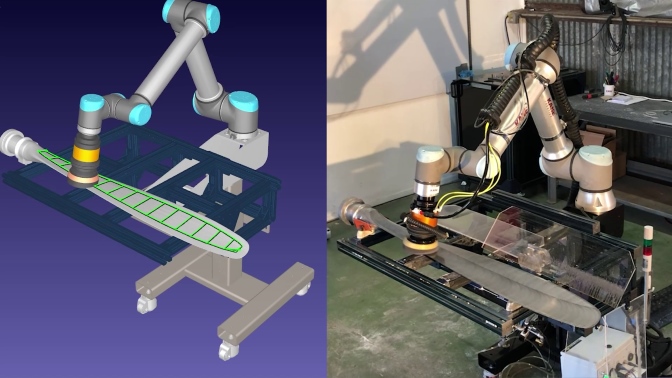
Pulido orbital con RoboDK
Kane Robotics utilizó RoboDK para automatizar el pulido orbital robotizado, consiguiendo un acabado superficial impecable con una precisión y eficacia inigualables.

La NASA utiliza RoboDK para inspeccionar varios robots
La NASA integró la inspección con robots duales con RoboDK, mejorando la eficiencia y la precisión en los procesos de control de calidad.
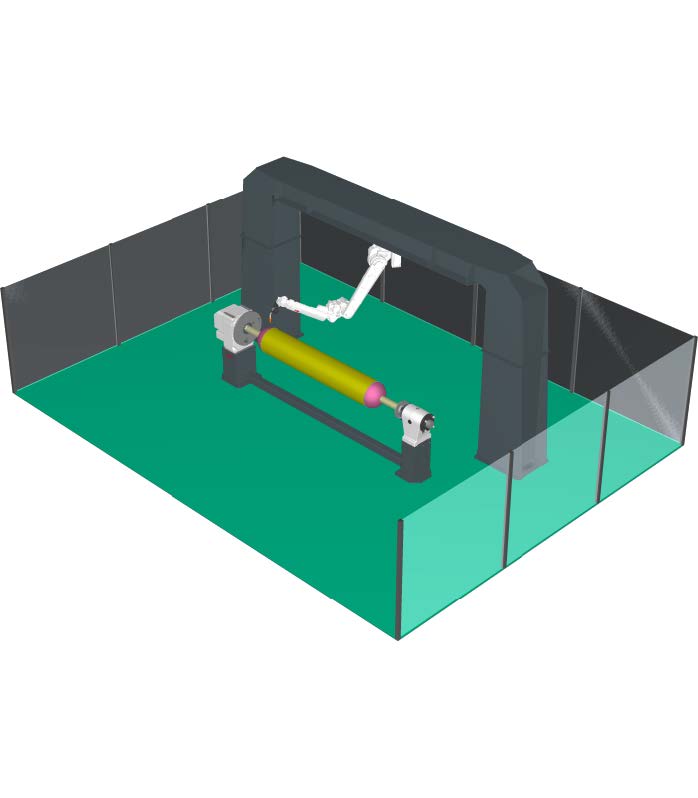
Soldadura robotizada con ejes externos
RoboDK simplifica la automatización de la soldadura robotizada, sincronizando robots y posicionadores de soldadura para optimizar los flujos de trabajo de soldadura automatizada.

Pintura robotizada con integración de API personalizada
RoboDK permite pintar con precisión mediante robots a través de aplicaciones innovadoras, como la creación de retratos instantáneos con precisión robótica y el apoyo a procesos de pintura totalmente automatizados, 24 horas al día, 7 días a la semana, sin intervención humana.