
Программное обеспечение RoboDK помогает сократить время мойки самолетов на 95%
Компания Wilder Systems использует функции программирования роботов RoboDK для автоматизированной мойки самолетов. Они разработали первую роботизированную систему мойки с использованием самолета F-16 и двух роботов Fanuc.

Роботы для точной обработки скульптур
Узнайте, как RoboDK позволил художникам, таким как Neoset Designs, использовать роботизированную обработку для создания сложных и точных скульптур с беспрецедентной эффективностью.
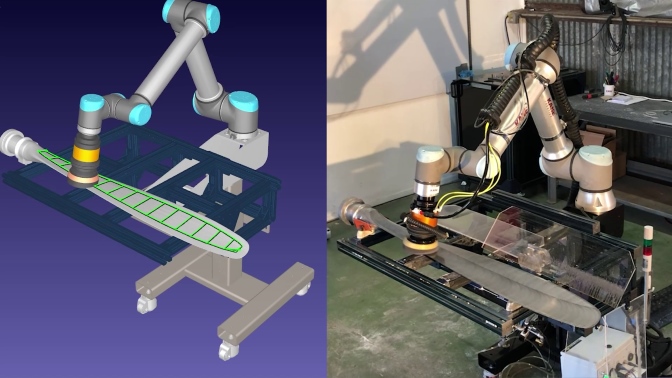
Орбитальная полировка с RoboDK
Компания Kane Robotics использовала RoboDK для автоматизации роботизированной орбитальной полировки, обеспечив безупречную обработку поверхности с непревзойденной точностью и эффективностью.

NASA использовало RoboDK для проверки нескольких роботов
NASA обеспечило возможность проведения инспекции с помощью двух роботов RoboDK, что повысило эффективность и точность процессов контроля качества.
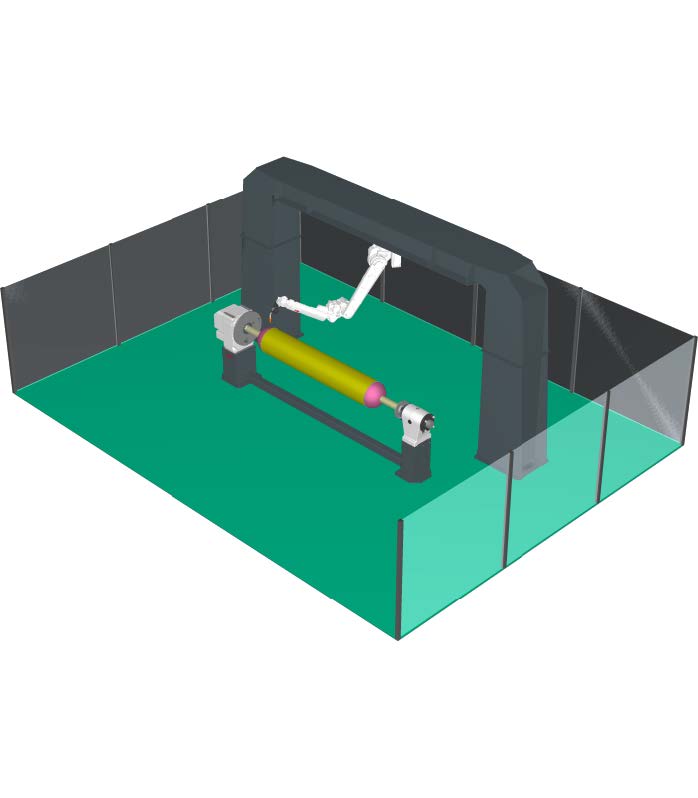
Робот-сварщик с внешними осями
RoboDK упрощает автоматизацию роботизированной сварки, синхронизируя роботов и сварочные позиционеры для оптимизации автоматизированных сварочных рабочих процессов.

Робот-рисовальщик с интеграцией пользовательского API
RoboDK обеспечивает точную роботизированную покраску благодаря инновационным приложениям, таким как создание мгновенных портретов с роботизированной точностью и поддержка полностью автоматизированных процессов покраски 24/7 без участия человека.