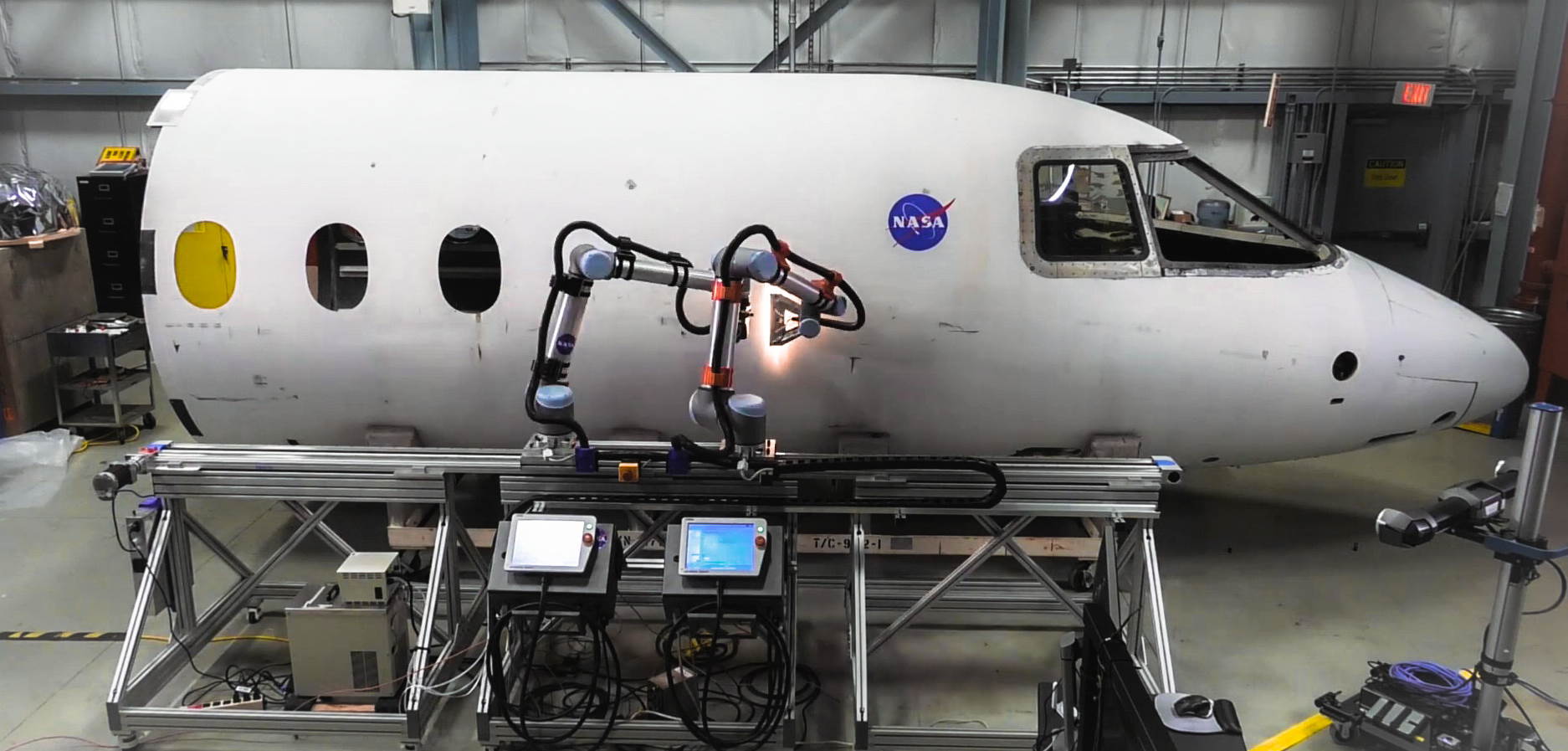
В 2017 году команда исследователей NASA из авиационной лаборатории Лэнгли в штате Вирджиния (США) работала над созданием системы автоматического инспектирования фюзеляжей из композитных материалов.
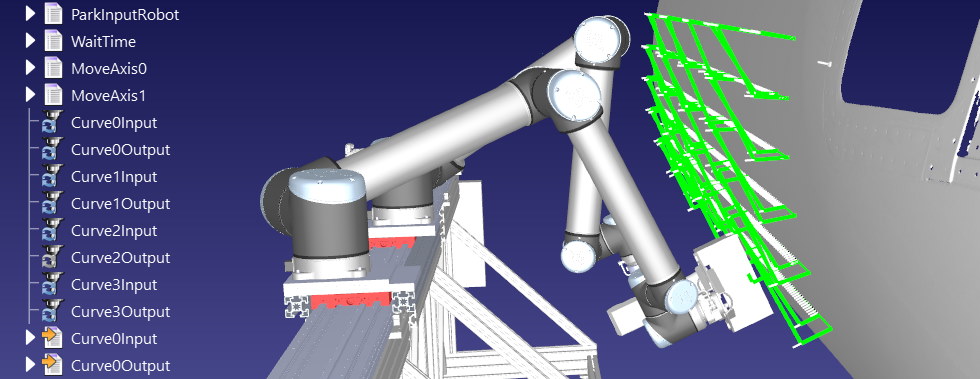
В этом процессе использовался коллаборативный робот UR10 фирмы Universal Robots, а моделирование и автономное программирование осуществлялось в программной среде RoboDK.
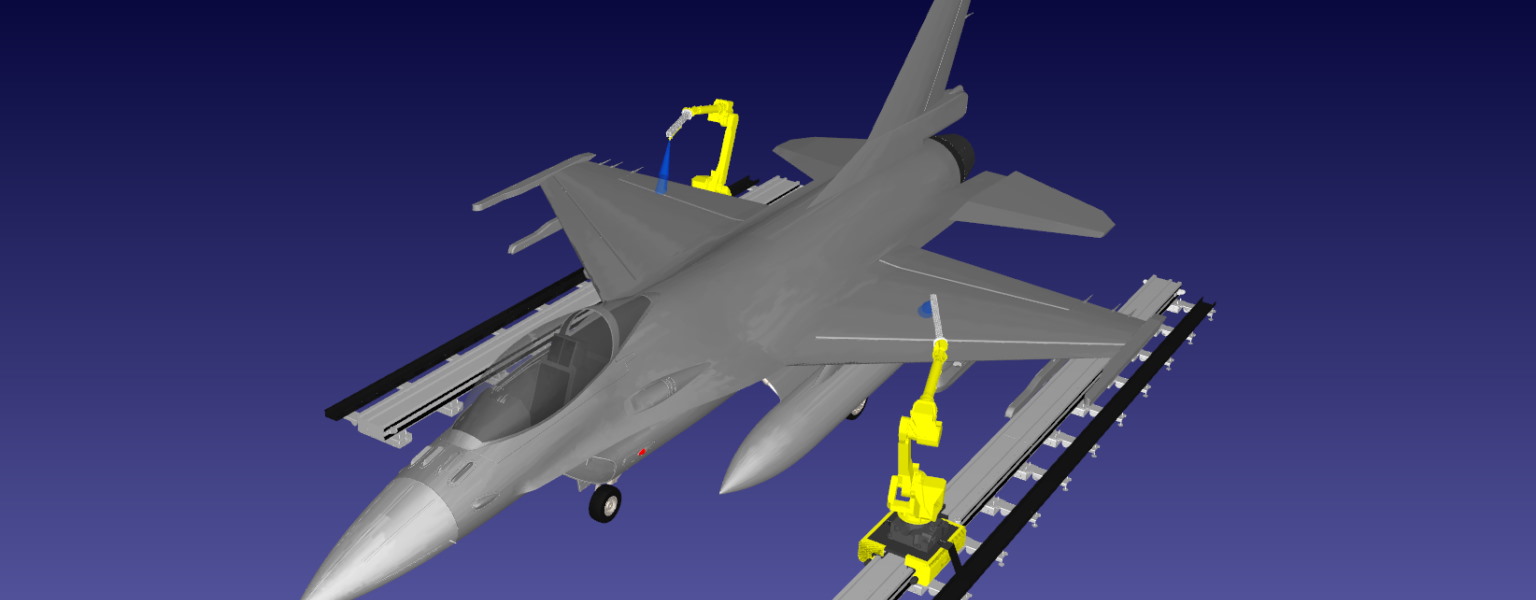
В 2019 году, опираясь на успех изначального проекта, была представлена мультироботизированная система инспектирования, которая состояла уже из двух роботов для проведения томографической проверки фюзеляжей самолетов.
RoboDK был спроектирован для выполнения подобных задач, требующих налаживания взаимодействия между разными программными компонентами. Это позволило исследователям синхронизировать двух роботов и подключить внешние оси.