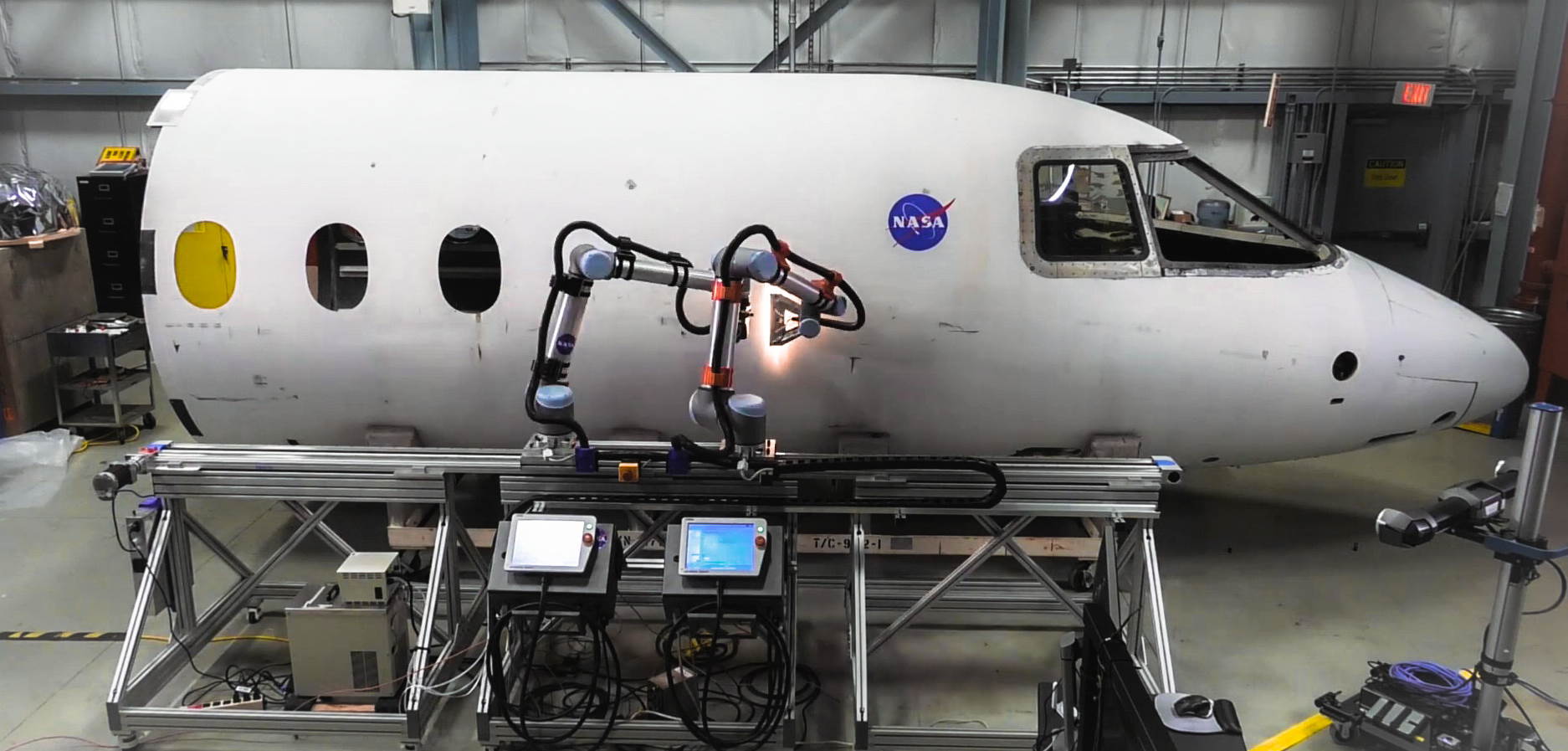
Nel 2017, un team del Langley Research Center della NASA, in Virginia, USA, è stato incaricato di sviluppare un sistema di ispezione automatizzato per le fusoliere degli aerei in composito.
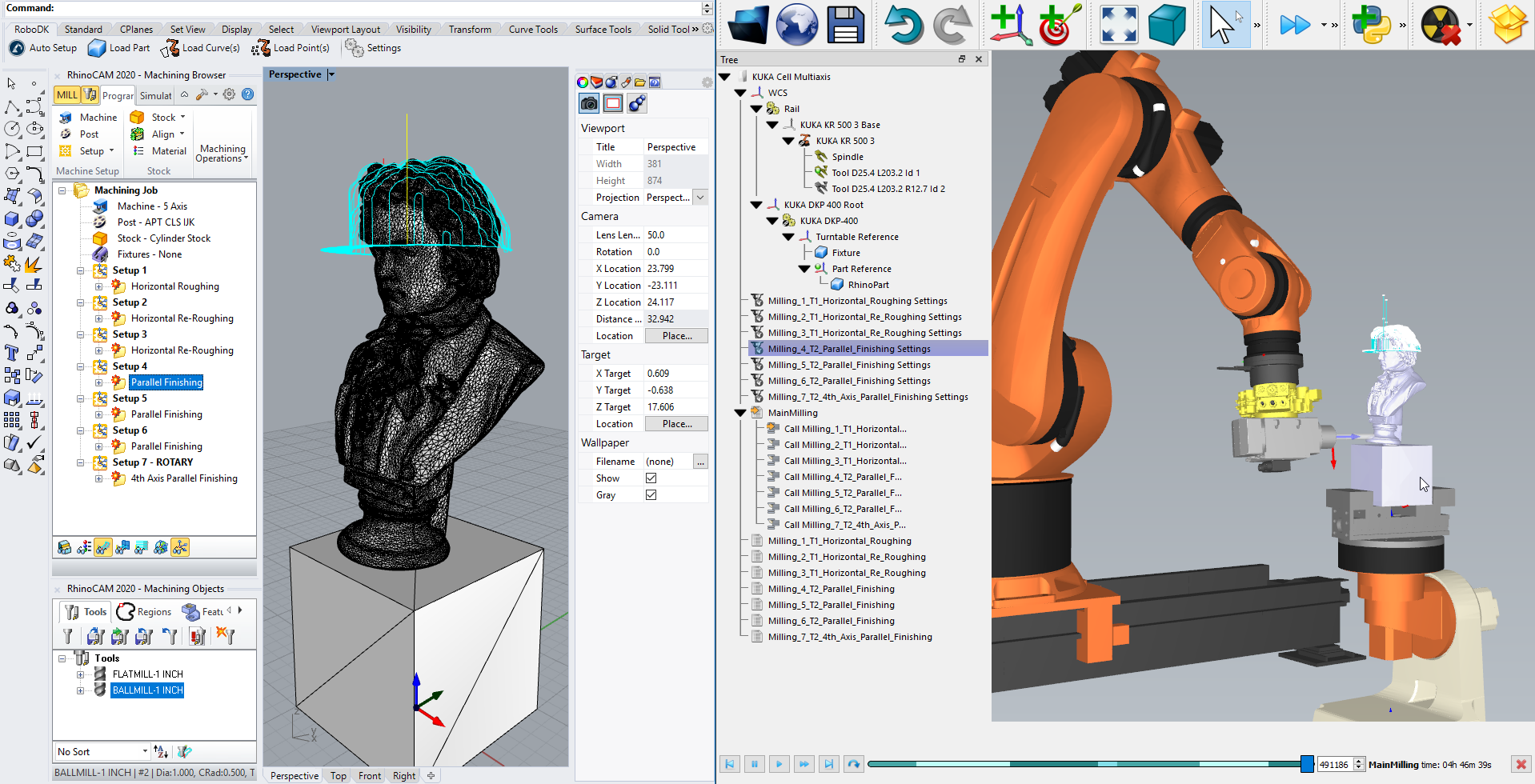
I ricercatori hanno optato per una soluzione basata su un cobot che utilizza un UR10 di Universal Robots e il software RoboDK per la simulazione e la programmazione offline.
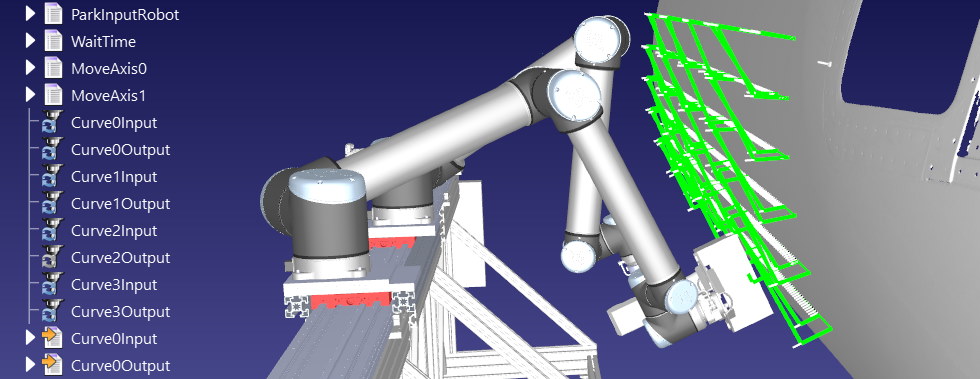
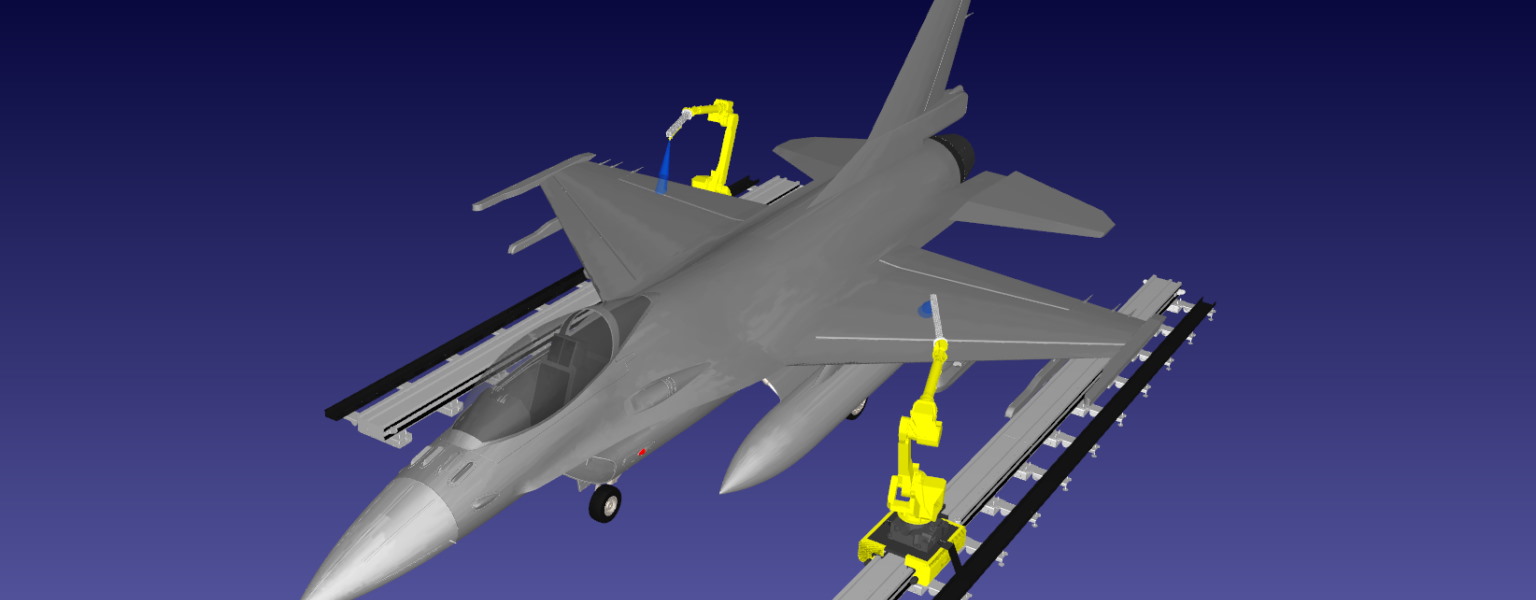
Nel 2019, sulla base del successo del progetto originale, la NASA ha presentato un progetto di sistema di ispezione multirobot che utilizza due cobot sincronizzati per eseguire ispezioni con tomografia a scansione di linea sulle fusoliere degli aerei.
Progettato per facilitare i flussi di lavoro multi-software, il software RoboDK ha permesso ai ricercatori di sincronizzare 2 robot e di incorporare assi esterni nelle loro simulazioni.