When it comes to making aircraft, safety is paramount… and that means inspection. One team at NASA is using RoboDK to achieve multi-robot inspection to increase the safety of their aircraft.
What do you think is the most important part of aircraft manufacturing? The issue of safety is probably going to be top of your list of concerns.
A team at NASA’s Langley Research Center is using multiple robots and RoboDK to automate and streamline the inspection of aircraft fuselages.
We first reported on this project a couple of years ago when the team started using RoboDK. At that point, they were only using one UR10 robot for an infra-red inspection system that uses short pulses of heat. At the time, they were only creating the first proof-of-concept:
“[We wanted] to show that we can do as good a job or better than we can do manually using the robotic system, with less labor involved.”
The project has certainly advanced in the past two years! The team is now using dual robots, combined with an external axis, and a more complex type of infra-red inspection.
Here’s how NASA uses RoboDK and why they’re now using multiple robots.
Explaining NASA’s New Inspection Task
The inspection task that the team performs is a type of “non-destructive evaluation.” This term refers to a large group of testing processes which are used to detect flaws in a manufactured product without destroying the product, as the name suggests.
In particular, the team at Langley performs infra-red detection, which involves heating the fuselage and then using an infra-red camera to detect flaws in the heated material.
As branch head Elliott Cramer explained:
“In conventional tomography, you heat a large area and then you inspect one area at a time. Currently, most inspections are done on a point-by-point basis. You’ll inspect a small area, you’ll move that inspection system over the surface of the system either manually or with some kind of a scanning system.”
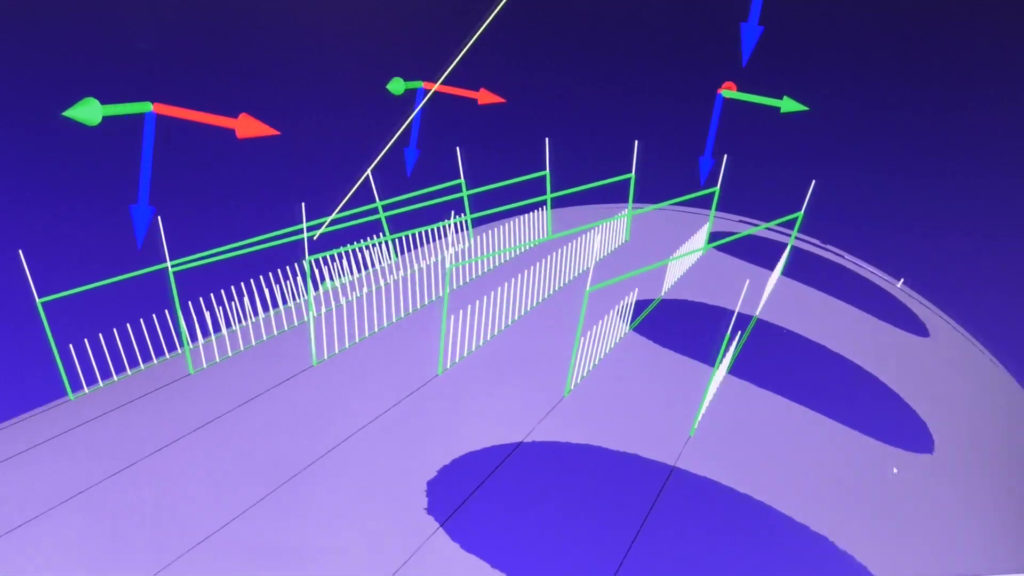
Using dual robots has allowed them to change the method that they use to “line scan tomography.” This involves moving a heating element and an infra-red camera in a consistent line.
He said:
“This is actually a moving inspection that’s very well suited to the use of robotics.”
The Benefit of 2 Robots Over 1
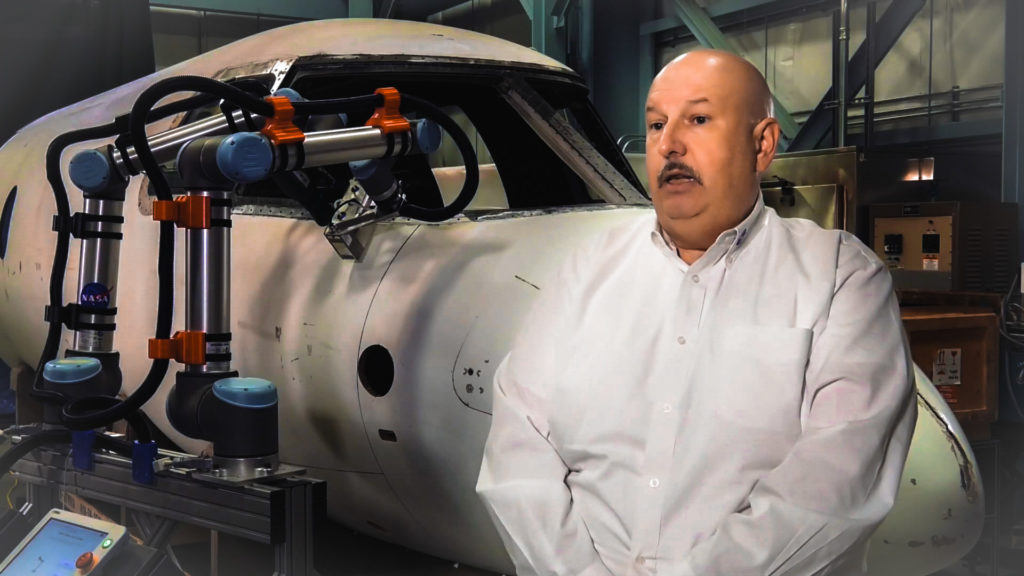
When we last caught up with the project, they were using only one robot with one sensor. This new inspection method requires two robots working together collaboratively.
The two robots (both UR10s) perform the following functions:
- The first robot holds a heating element, which it moves in a consistent line along the fuselage.
- The second robot holds a FLIR infra-red camera. This moves along the fuselage immediately behind the heating element. The captured image is used to form a scan which the team analyzes to detect defects in the material.
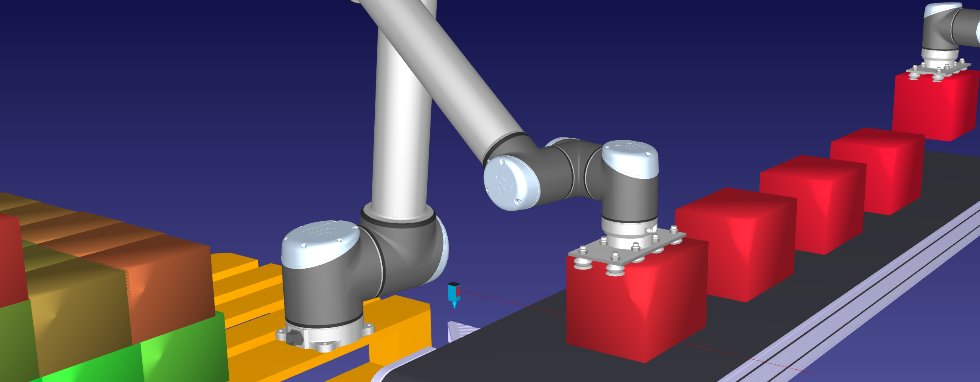
To increase the workspace of the task, the two robots are fixed onto a Festo 7th Axis external axis. This allows them to move along a much longer length of the fuselage and ensures that the robots move at exactly the same speed.
Why NASA Needs Robotic Inspection
Elliot Cramer explained that there are several benefits to using robots in this type of inspection, compared to performing the scans manually.
Repeatability
One of the major problems with manual scanning is that you can never position the sensor in exactly the same place every time. Re-positioning the sensor by hand to double check a reading would take forever.
Using robots removes this problem.
Cramer explained:
“The main advantage is repeatability. If you need to go back to an inspection location again, either to re-inspect or with another technique. Having the robots do it allows you to go back very accurately.”
Speed and Accuracy
Another issue with manual inspection is that it takes a long time. Improving this speed was a core aim of this application:
“The goal of this project is to increase the rate of inspection and the accuracy of inspection that’s currently going on, whether that’s done in the manufacturing environment right after the fuselages have been made or if it’s done at a later time during in-service inspection of the aircraft.
“You can now cover large areas, you can handle the complex curves of the aircraft, but in a much more rapid fashion. This is designed to speed that process up but still get the same accuracy.”
Autonomy and Coverage
The team’s previous manual inspection required several technicians working together. This was quite inefficient. However, even with multiple people, it wasn’t certain that they would achieve full coverage of the aircraft fuselage due to the inaccuracies caused by manually placing the sensor.
Cramer explained that both of these problems have been overcome by using the robotic system:
“It can autonomously go off and do the inspection once it’s been programmed and we are ensuring 100% coverage.”
How NASA Uses RoboDK
RoboDK plays a key part in NASA’s inspection application. It’s easy to combine multiple robots with RoboDK as well as to incorporate external axes into the programming.
Here’s the process that they use for the inspection:
- With a Creaform optical scanner, the engineers first create a surface map of the fuselage. This is carried out manually.
- Using the scanned data, they are able to accurately locate the fuselage in space and relative to the robots.
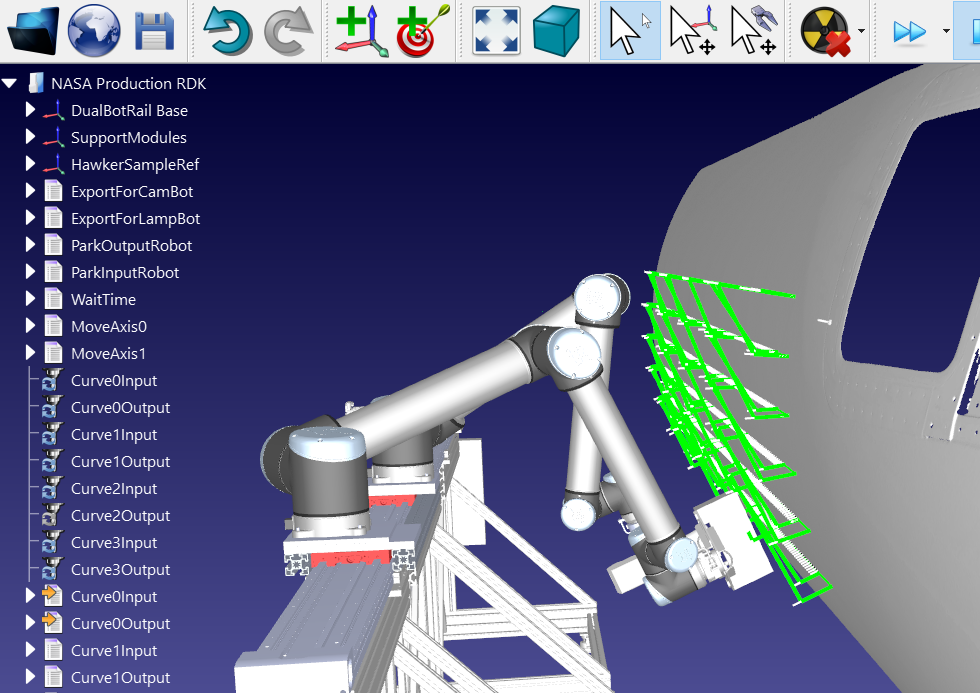
- They create the path in RoboDK which automatically generates robot code.
- The robots perform the inspection task and build an infra-red scan of the fuselage.
- Using Matlab, the engineers then analyze the scan for defects.
As you can see, this is a perfect example of a multi-software workflow, which RoboDK is designed to facilitate.
What’s Next for the Project?
The team has achieved an impressive improvement of their inspection process using multi-robots and RoboDK.
But, they have further plans for the application.
Elliott Cramer explained:
“One of the other things that we’re working towards is the ability to automatically map the data that we collect to an image of the fuselage. That will ensure the long term durability of those vehicles as they fly. And have a long-term digital record of that.
“The ultimate goal is to increase the safety of air travel. “
Which parts of your inspection processes could benefit from multiple robots? Tell us in the comments below or join the discussion on LinkedIn, Twitter, Facebook, Instagram or in the RoboDK Forum.