检测是一项单调且“吃力不讨好”的任务,所以,我们需要一个完美的机器人解决方案来完成它!
可想而知,在铁路工程中,检测可不是件容易的事情……除非你正在使用RoboDK!
你是否观察过两节车厢之间的连接装置?
你应该能够想起两列车厢中间有个耦合保持装置。这个耦合装置并不是简单的机械设备,整个装置里面布满了必要的电气线,这些电线里都承载着车厢的不同信号。当两个装置耦合时,这些电气点必须保证良好的导电性,让其安全地连接,否则,列车的安全会因此受到影响。
保证一个安全的电气连接装置并不容易。我们可能都有过这样的经历:就是当我们把插头接入插座的时候(比如手机的充电器),发现竟然没充上电。我们就试着拔掉又重新插上…接着突然不知道怎么的,又能充上电了。很明显,我们绝对不期望这种情况发生在铁路上。耦合装置要非常敏捷,在它需要发挥作用的时候。所以为了达到这种高要求,就需要检查人员不断检查了。
英国Glasgow Caledonian大学的团队
下面这个案例来自英国格拉斯哥卡里多尼亚大学的一个团队。
某铁路公司联系了该小组,他们想要自动化检查列车的联轴器(“列车联轴器”是专业术语,应用范围包含于铁路车辆,比如车厢,货车,长途汽车等等)。

这个小组汇集了工程与建筑环境学院的资深研究员,都是自动化铁路、制造和机械系统方面的专家。
该研究结果于 2019年10月发表在ScienceDirect的《机器人与计算机集成制造》期刊上。
任务:电动耦合检查
铁路公司需要完成的任务是找到一种方法来自动检测联轴器的电头。这个任务目前都是由检验技术人员手动执行的。
手动任务包括:
- 联轴器的深度清洁
- 联轴器的肉眼检查
- 使用电压表和电阻测试仪进行电气连续性测试
技术员大概需要30分钟才能手动完成以上任务。
如果你了解一个铁路公司拥有数量众多的车厢,就能想象出技术人员要做多少手动检查的工作了。 例如,英国国家铁路公司计划在 2021年运营一共 7,000节车厢,每个车厢有两个联轴器,这相当于 875 天(8 小时/天)的工作,做的事情只是检查联轴器。
而自动检测这项工作非常适合交给机器人来做,正如我们之前介绍过的案例一样。
挑战:昂贵,安全系数低,工程质量不稳定
对铁路公司而言,这种预防性的维护检测非常必要,但是代价也很高。
机器人自动化是这项任务的最佳选择,有三个原因:
- 成本——手动完成任务的时间成本很高。从长远来看,自动化更经济。
- 安全——检查任务要求技术人员站在服务区的高架平台上,靠近高压电缆和架空电线。这让检查人员处于一个较危险的环境,但机器人不存在这个问题。
- 质量稳定——任务的单调使得人力技术员很难在检查中保持一致的高水平。机器人则能保证稳定地完成任务。

解决方案:工业机器人配合RoboDK与MATLAB
研究人员选择使用RoboDK和MATLAB给工业机器人编程来解决这个问题。
一项有挑战的任务
研究人员说,“对于熟练的操作员来说,整个过程可能看起来很简单,但对于 [自动机器人系统] 来说,这是个有趣的挑战。”
那么对机器人应用来说,挑战有哪些?
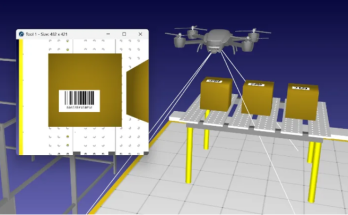
- 未校准的环境——耦合器在3D空间中的确切位置和方向是未知的,因为机器人是被安装在了可移动的火车车厢上。机器人系统需要检测联轴器的位置,并实时调整它的检测程序。
- 目标小——电触点是非常小的引脚,用机器人视觉传感器检测存在困难。
- 灰尘和其他杂乱的环境——铁路现场环境非常混乱,图像也容易模糊,这会使检测耦合和引脚特别困难。
硬件设置
研究人员配置了以下硬件:
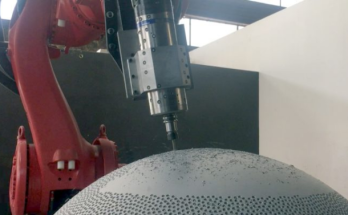
- Fanuc LR Mate 200iD 6 轴工业机器人。
- 用于计算机视觉的RGB摄像头。
- TOF传感器,与相机图像结合可生成3D图像。
- 定制的机器人末端执行器,用于检测
该项目的主要研究成果之一是验证了视觉伺服,该团队结合3D相机软件,通过视觉伺服检测了耦合位置。
软件设置
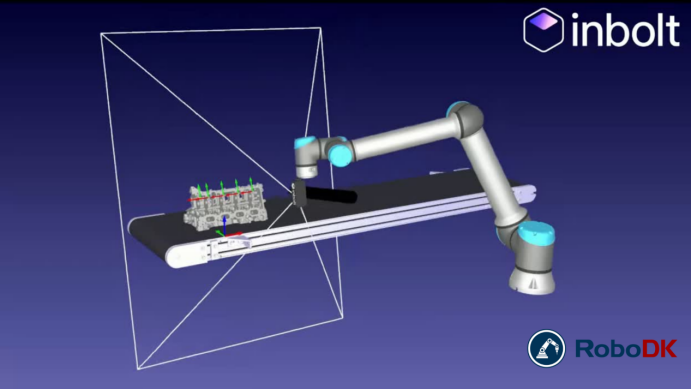
软件主要基于MATLAB,MATLAB可以帮助研究人员将3D视觉体系与机器人技术结合起来。可以这么说,RoboDK是机器人仿真的最佳选择,因为我们可以通过RoboDK的API轻松连接到MATLAB。
(如视频不能正确加载请点击链接至优酷观看)
软件配置包括:
- 基于先前对机器人路径规划的研究,使用MATLAB和Simulink进行计算机视觉编程。
- RoboDK可以用来模拟机器人系统。这对于研究人员来说很有帮助,因为当无法对机器人进行在线测试时,可以通过RoboDK实现很多离线测试。
自动化铁路检测的未来?
通过这个项目,研究人员证明了使用机器人对铁路联轴器的自动检测。他们也验证了系统的各个组成部分,特别是检测联轴器的视觉伺服。