今天我们来介绍一下,美国国家航空航天局(NASA)的“无损机身材料评估”工程,如何利用RoboDK软件给机器人编程,实现对飞行器机身的自动检测。
美航局需要对每台飞行器机身进行“全身检查”,检测飞行器生产过程中可能产生的瑕疵,并预防这些瑕疵给飞行器的使用带来影响。
美航局兰利研究中心的科学家们对先进复合材料机身进行研究。研究的一个重要步骤为检测机身材料的质量,并记录全面的检测数据,为今后的机身评估提供基础。该检测需要将“检测头”对准机身,移动检测头的位置直至覆盖全部机身。美航局需要一个快速有效的自动程序,加速检测过程,减少成本。
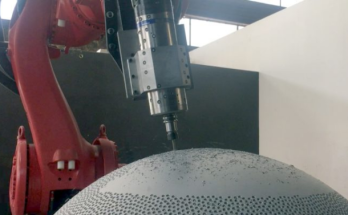
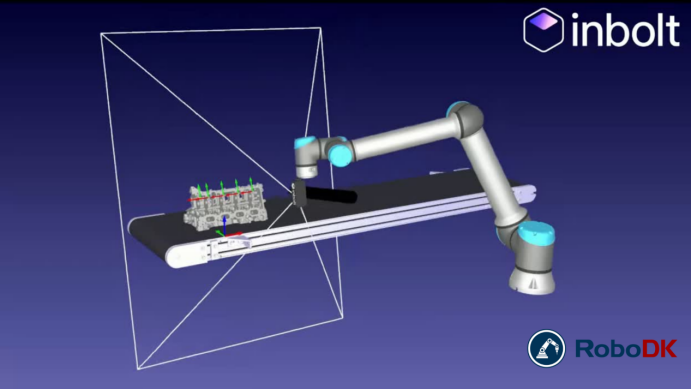
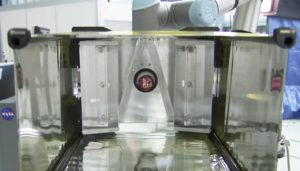
使用优傲的UR10协作机器人,一个操作人员在控制器上运行事先编译好的机器人程序,而机器人将检测头移动至机身各个位置。这一过程,由RoboDK软件的编程功能实现。RoboDK利用飞行器、机器人与检测头的3D模型在软件中规划好检测头的各个位置,根据机械臂的工作范围及位形仿真规划出最佳的运动路径,即省时又能确保不会漏掉任何一个检测位置。


RoboDK软件让我更好地发挥机器人的作用,根据UR10以及检测工具的物理几何条件实现任务,并提供了用户友好的应用编程接口与仿真环境。
Joshua Brown
Contractor at NASA Langley Research Centre
该工作如果由人工完成,将需要3-4个技术人员花费更长的时间操控检测头,并且难以保证检测头能够全面、均一地覆盖到机身各个位置。
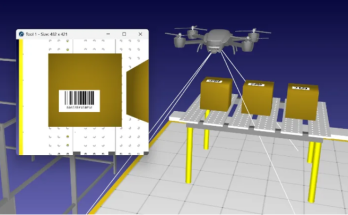
检测头由热能闪光灯及红外线检测相机组成,当热能量通过快速闪光流经机身时,长波红外相机的传感器就记录这一过程的温度数据。通过分析热流通过机身复合材料结构的数据,可以在不破坏机身的情况下检测出材料中异常的区域,这一过程即为无损评估。
美航局在未来还有其他的检测目标,例如使用超声波仪器检测。同样地,使用RoboDK软件对机器人进行编程,将保证高效、准确、全面的检测结果。
(如视频不能正确加载请点击链接至优酷观看)
Elliott Cramer介绍到:“在电脑中可以事先设计好检测的路径。使用飞行器的3D模型,[…]机器人以及检测头的3D模型(红外检测系统),在电脑里,你可以仿真并规划出最高效的检测路径,然后将程序传输至机器人直接运行就可以了。”
这个项目完全由美国国家航空航天局兰利研究中心开发:https://www.nasa.gov/langley
来自国际工业界刊物Robotics and Automation News的报道:https://roboticsandautomationnews.com/2018/01/29/robotic-inspection-nasa-testing-new-system-for-checking-and-fixing-aircraft-fuselages/15833
学习使用SCRIPT代码、URP程序来给优傲机器人编程,并直接使用电脑连接机器人运行你编译好的程序:https://robodk.com/doc/#UR