为了保证离线编程的准确性,我们今天介绍一下工业机器人应用中涉及到的各种校准(Calibration)与测试功能。
提到工业机器人自动化,人们想象到的场景往往是机器人快速又准确地完成任务。说“快速”,是因为机器人内部的马达可以高速运转,比人类的速度快得多;说“准确”,是因为机器人的材料与构造都依照精确的坐标标准。那么,用户在使用中,如何保证机器人运行时参照的坐标都是精确的呢?答案是需要通过校准来完成。
下面我们介绍RoboDK的三种校准以及测试功能。
一、校准工具中心点(TCP)
工具中心点,一般为机器人工具的“中心位置”,例如焊接工具的末端或者手指型夹具的闭合点位置。工具中心点的位置被用来“牵动”机器人运动轨迹,即机器人需要通过关节运动来达到其末端的工具中心点位置为用户所需要的。
校准工具中心点的意思是找出该点相对于机器人法兰的位置关系,记录在软件或机器人控制器中。这个过程包括将机器人移动至不同的位置,并记录下来,RoboDK即可通过所记录的位置点做出计算。
在RoboDK中有两种移动的方式计算工具中心点(TCP):
- 同点运动——驱动机器人,将工具中心点从不同的方向对准同一个空间内的点,在软件中通过“Calib XYZ by point”功能来完成。
- 同面运动——驱动机器人,将工具中心点从不同的方向移动至同一平面上,例如操作台的平面,在软件中通过“Calib XYZ by plane”功能来完成。这个功能对于校准一个球形工具的球心是尤其有帮助的。
完成校准至少需要3个不同的位置点,但是我们建议使用至少8个点来增加准确性。
去除极端值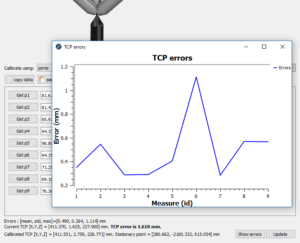

当完成校准后,你可以通过RoboDK检查校准时记录的多个位置点,其中如果包括极端值,可以将它们删除,这时校准结果会重新计算。这个功能可以校准结果不被极端位置点影响。
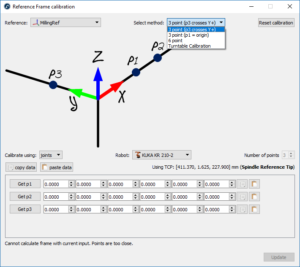 二、校准用户参考坐标系
二、校准用户参考坐标系

如果你需要定义用户参考坐标系(我们也建议你这么做),你也可以使用RoboDK来校准它。这需要你使用已经校准好的工具中心点(TCP)来标定新的用户坐标系的位置。注意确保工具中心点的准确性再进行这一步。将工具中心点移动至坐标轴上的三个点,并记录位置,使用RoboDK自动计算出用户坐标系的位置。
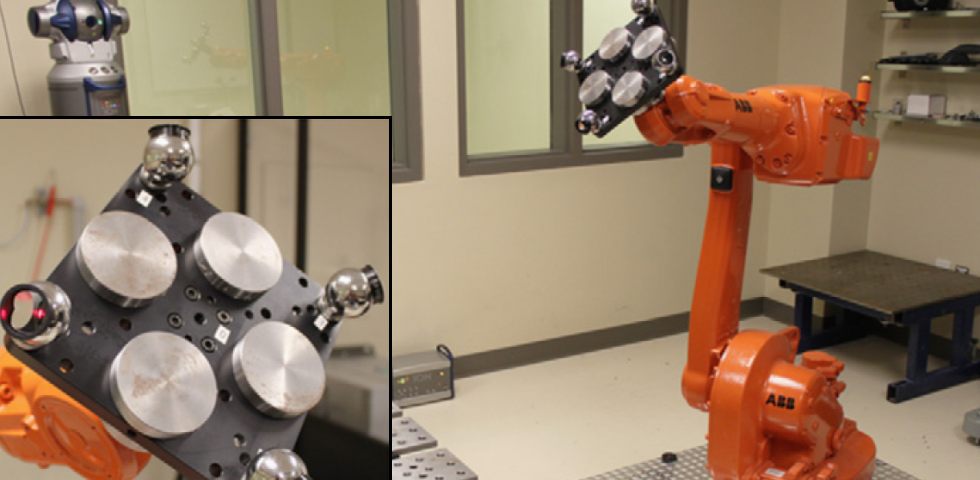
三、机器人校准
机器人校准功能可以提高机器人本身的准确性,工业机器人的一大特点,就是具有良好的位置“重复性”,而位置准确性却无法保证。机器人校准,可以通过更好的机器人运动模型公式,对你使用的机器人做更详细的“描述”,从而计算出位置误差补偿。
机器人校准需要精度很高的测量仪,它们的造价往往高于工业机器人本身。
使用RoboDK校准机器人之后,机器人的准确性往往可以提高数倍,这里有一个相关的介绍。
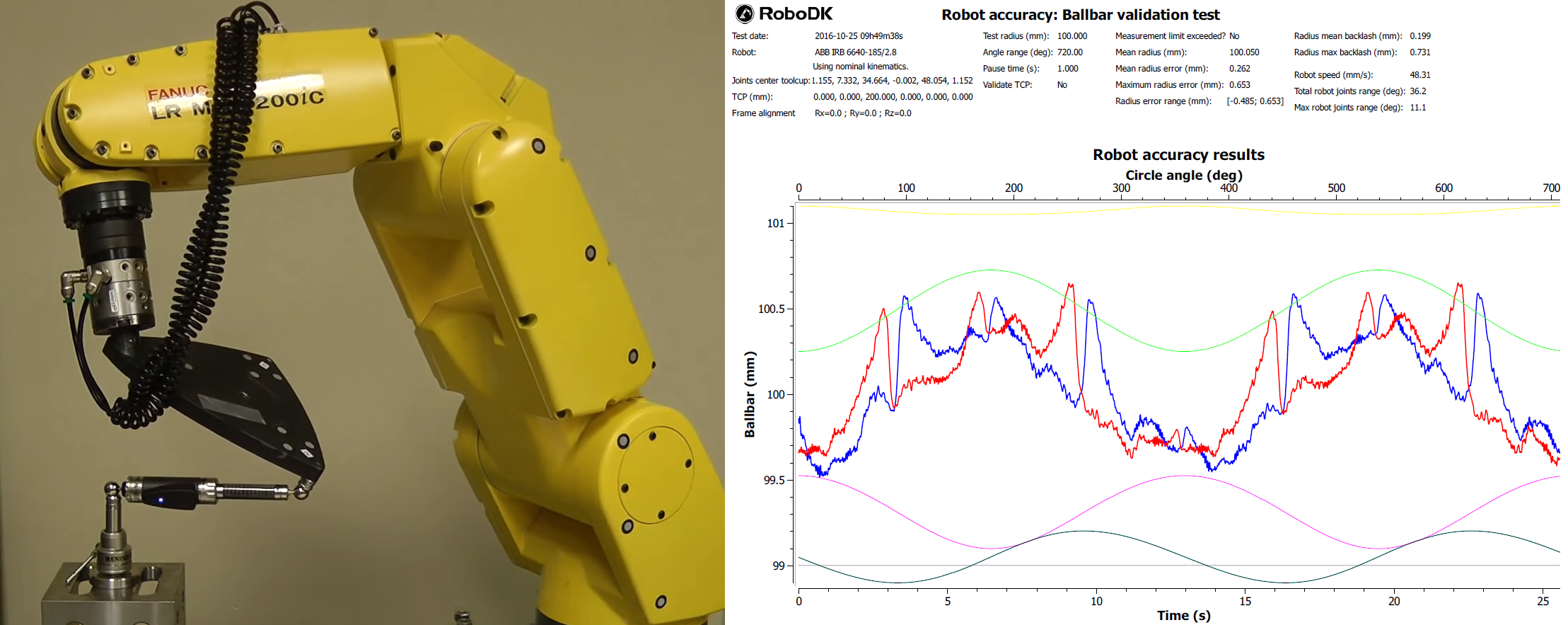
四、机器人性能测试
你可以试着使用机器人做一些简单的测试。例如,驱动机器人做直线运动50厘米,用质量较高的卡尺等工具测量一下实际运动轨迹的线性与距离是否与你的设定相符。测试对于离线编程来说很重要,如果你有准确的测量设备,这将会很有帮助。
RoboDK的测试功能支持多种激光测量设备,以及无线球杆仪设备(造价相对激光设备较低)。这些测试对机器人的性能做出深度分析,为机器人的长期使用与维护提供宝贵数据,更加确保机器人的准确性,达到飞机、汽车等行业相关供货要求。


中国用户如何购买软件许可证
你好,感谢你的留言!我们的销售人员会通过邮箱与你取得联系。