You might not realize, but we are constantly improving RoboDK. Our team is always working to make your robot programming experience better and easier.
Since the start of 2022, we’ve introduced a bunch of new RoboDK updates to the software that you might not have seen yet.
Some RoboDK updates have been huge. The announcement of our brand new RoboDK for Web is big enough that it had its own launch campaign.
But, we’ve also made plenty of smaller updates to RoboDK that will make your life just a little bit easier.
Here are 5 of the top new updates we’ve made recently, plus 9 smaller bonus updates…
1. Improvements to the Fusion 360 and Inventor Plugins
First up, we’ve been making some improvements to the plugins for Fusion 360 and Inventor. These changes bring the plugins up to date with the latest versions of these popular CAD/CAM packages from Autodesk.
Our plugins allow you to seamlessly integrate your product design workflow into your robot programming. They mean that you don’t even have to leave your favorite CAD/CAM environment to program the robot.
These updates include:
- Fixed importing of 3D models from Fusion 360 when using STEP and IGES files.
- Better install of the RoboDK plugin for Inventor 2022
You can read about the Fusion 360 plugin here and about the Inventor plugin here.

2. Brand New Shiny Online Robot Library
The RoboDK Robot Library is the hub of all the hundreds of robots that our software supports. It also includes an impressive selection of robot tools and accessories.
In the Robot Library, you can:
- Sort the robots by manufacturer, type, and property.
- Compare the key properties of every supported robot.
- Download the ROBOT file to open in RoboDK.
Until recently, the library was functional but it didn’t look as good as it could have. We have now updated the Robot Library and added some extra features to help you get even more from this tool.
New features we’ve added include:
- A cleaner, easier to use interface with more responsive selectors.
- The ability to open the robots directly in RoboDK with the new Open button.
- A separate information page for each robot including common applications with the new View button.
- Direct access to the robot in RoboDK for Web with the new 3D View button.
Check out the new Robot Library online here.
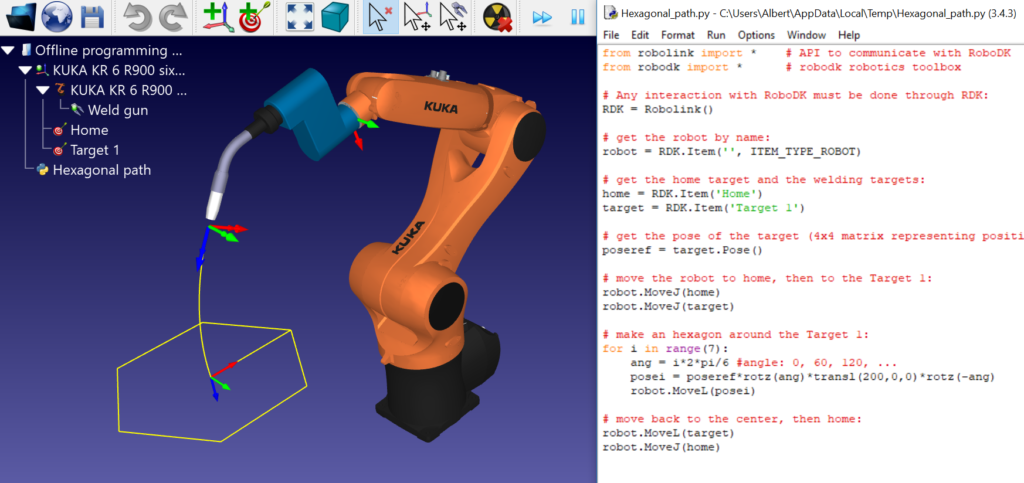
3. Python API Restructured
Although RoboDK’s graphical interface is popular, a lot of customers use RoboDK via the API. This allows you to easily integrate robot programming into your own programs and code.
We have just restructured the whole Python API for the first time in years.
RoboDK Version 5.4.1 is mostly a restructuring of all our Python modules to prepare for future updates to the software (yes, there are many more exciting updates to RoboDK in the pipeline!).
Changes include:
- The robolink module is now robodk.robolink
- The robodk module is now split into robodk.robomath, robodk.robodialogs, and robodk.robofileio
The new changes are all backward compatible. This means you can keep your current Python scripts as-is for both past and future versions of RoboDK.
However, the changes will not be forward compatible. When you start to use the new semantics, your scripts will no longer work with previous versions of RoboDK.
We have also updated the Python documentation to reflect these new changes.
4. Improved Apps and App Loader
We have packed a lot of functionality into RoboDK. There are many features that you might not ever use personally, but that are vital for someone else’s robot setup. This is what makes RoboDK so flexible.
One way that you can add even more functionality to RoboDK is through the use of Apps and Plug-ins. The Plug-in Interface allows you to extend and customize RoboDK with your own code.
The App Loader makes this step even easier. With it, you can quickly load code into RoboDK as if it was a plug-in. This gives you the ability to add custom buttons and actions directly to the RoboDK interface.
We have recently improved the App Loader and some of the existing Apps.
5. Stäubli and Omron Post-Processor Improvements
Post-processors are at the heart of RoboDK. They convert your robot program into instructions that your robot model can understand and run.
We are constantly updating the post-processors to reflect changes made by robot manufacturers to their products.
Most recently, we have updated post-processors from:
We have also improved the default post-processor sample that comes with RoboDK. This will be helpful if you are creating your own post-processor from scratch for a custom robot type.

9 Other Small Upgrades We’ve Made Recently
There are plenty of other small upgrades and improvements that we have made to RoboDK since the start of 2022.
We’ve also made small improvements to these 9 aspects of RoboDK:
- “Build/Modify Mechanism or Robot” wizard.
- “Model Mechanism” menu.
- Path and weld settings.
- 3D navigation when using the 3D view toolbar.
- Robot calibration parameter selection.
- Behavior of Alt+Shift functionality.
- Removal of the default auto-extraction for curves.
- Allowed for negative values to start and end curves in Curve Follow projects.
- Added an option to model parameter “d5” when building a 6-axis robot arm.
A Quick Note on Educational License Changes…
Finally, we have a small announcement if you are using an educational license. If you are on such a license, we will have already contacted you about this, but in case you missed it.
Since January 1st, 2022, educational licenses are now subscription-based. They have a fixed, automatic 30-day trial to bring them in line with other licenses.
If you have any questions about this, please get in touch.
What new features would you like to see in RoboDK? Tell us in the comments below or join the discussion on LinkedIn, Twitter, Facebook, Instagram, or in the RoboDK Forum.. Also, check out our extensive video collection and subscribe to the RoboDK YouTube Channel