每个机器人编程人员都有自己的编程偏好,今天我们介绍自定义RoboDK界面的10种方法,以方便用户使用。
你有没有试过在别人的厨房里给自己做早餐?很可怕吧?因为你不知道餐具在哪里,面包机有一排奇怪的按钮,冰箱里面的东西也乱七八糟的。
这可能就是你在用一种新的编程软件时会有的感受,因为界面让你看得非常不舒服,也难以适应。然而,使用RoboDK时,这个问题将得以解决。
RoboDK为了让用户能够在软件内完全自定义其使用界面,提供了各种选项,可以帮助你把它改造成你想要的样子。
以下就有10个你不得不知的自定义方法,帮助你设计出最适合你的界面。
1. 转换为深色模式
很多年前当我还在读大学的时候,我的一位同事跟我分享了编程时使用深色模式的好处。
很多软件使用的是白底黑字。然而,深色模式会把所有颜色更突显出来,比如,鲜亮的颜色在黑色背景就很突出。很多人也说,深色模式也可以减少眼睛疲劳(在老式阴极射线监测中,确实可以看到它能够减少闪光)。
虽然目前有一些相反的理论,探讨在当代屏幕中使用深色模式究竟是不是对人的眼睛有益——在编程时,可以定时让眼睛得到适当休息是最好的——但我们还是可以这么说:有的人就是比较喜欢使用深色模式。
如果你就是这样的人,那么你只需要在你的操作系统中选择深色模式,自动激活RoboDK界面中的这一模式。你也可以手动通过“显示”选项设定深色模式(工具 > 选项 > 显示)。
使用有机发光二极管的话(虽然不是液晶显示屏),深色模式也可以降低屏幕使用的电量。如果你在使用电池设备来操作RoboDK,那这是最好不过的了。
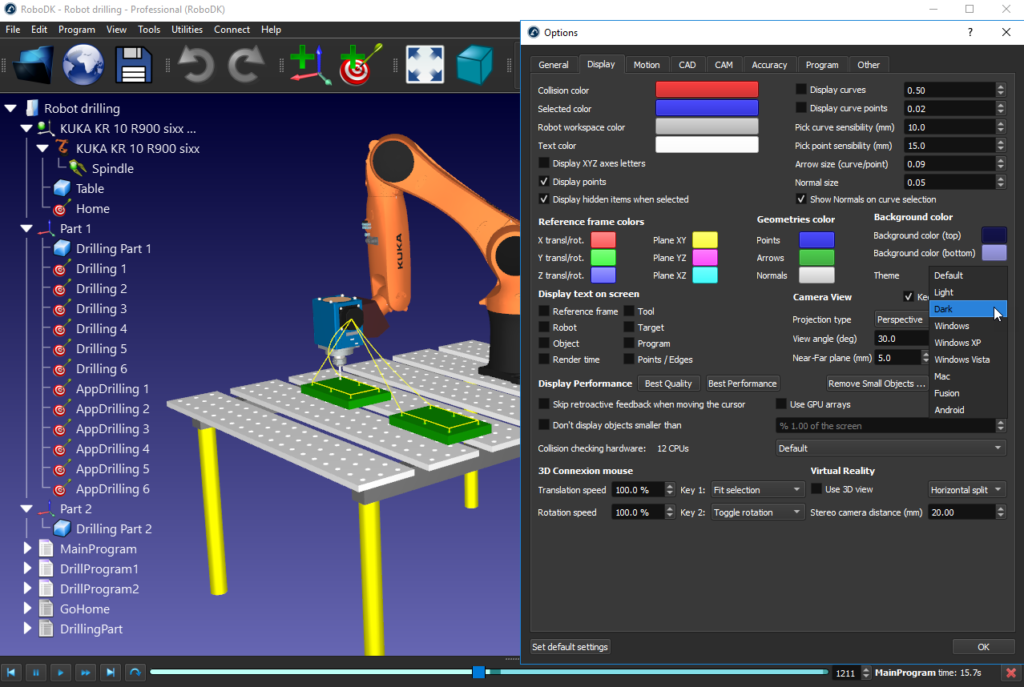
2.改变所有的颜色
即便不使用深色模式,你也可以改变RoboDK界面几乎所有的颜色,自定义成你喜欢的样子。
你可以改变颜色的部分包括:碰撞检测颜色、字体颜色、色颜点、背景颜色、参考坐标系颜色,以及所选目标的颜色:工具 > 选项 > 显示。
3.匹配合适的鼠标模式
作为使用多种3D图形处理程序的用户,我完全理解刚开始转向一款新软件时,它的鼠标模式跟你惯用的完全不一样的那种崩溃感:突然间,(方向)上变成了下,下又变成了上,鼠标滚轮的功能改变了,按键功能也跟你以前的完全相反。
在RoboDK里,你可以把鼠标模式调整到你喜欢的模式:工具 > 选项 > 通用。
4. 自动匹配你的CAD/CAM软件
如果你已经通过我们的插件,在RoboDK中集成了你的CAD/CAM软件,那就可以让RoboDK自动匹配你在该软件中的视图模式和鼠标模式。
例如,如果你使用SolidWorks的插件,你就可以通过插件菜单将界面设定为“SolidWorks”主题。
5. 改变语言
在RoboDK里,你可以选择语言:工具 > 语言。
在编写的时候,软件支持16种最常用的语言。虽然并不是每种语言都充分得到了翻译,但主要的性能是得以呈现出来的。
6. 转换视角
使用3D图像的软件多会遇到一个有趣的问题。有时候你只想要以真实世界中的视角来查看你创建的对象(真实视觉效果),但也有的时候你希望视角反映出物体更准确的尺寸大小,即便这样的模式看起来并不太真实。
这种时候,你就可以通过RoboDK来转换这两种视角:工具 > 选项 > 显示,可以选取透视图或正交图视角。
7. 转换数字格式
在表达数字的时候世界各国有两种不同的表达方式:一种使用小数点(.)来分隔小数,另一种是反过来使用逗号(,)。
例如:
在日本,数字是这么写的:1,234,567.89——这一格式为世界上41%的国家所用。
而在瑞典,数字是这么写的:1.234.567,89——这一格式为世界55%的国家所用。
在加拿大,人们则会同时使用两种格式。具体选择使用的格式会视上下文而定——世界上有4%的国家会这么做。
你可以通过在RoboDK里转换成所在区域的数字格式:工具 > 选项 > 通用。
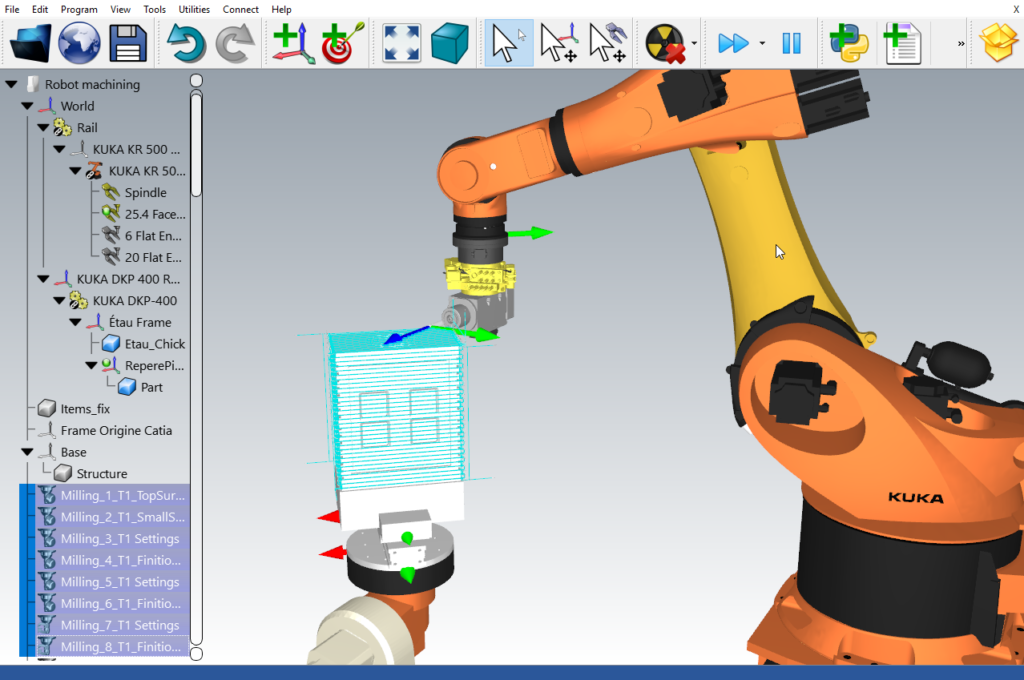
8. 设定树形工作站的大小和风格
在RoboDK左边的窗口可查看程序树。它包含了当前仿真窗口中的所有元素及程序指令。
有时候,你可能想缩小程序树来全面查看里面的对象。但又有的时候,你会想把它还原到原有的比例。你可以通过长按Ctrl键并滚动你的鼠标滚轮来完成这样的操作。
你也可以把树的背景从透明改变成入坞,或反之:视图 > 在窗口内显示程序树。
9. 优化速度和性能
即便在性能不太好的电脑上,RoboDK也能很好地完成工作。然而,你可能需要转换一些显示设置来减少计算机的负担。
软件内有三个选项与显示性能有关,用户可以通过 工具 > 选项 > 显示 找到它们。你可以选择以最佳质量来呈现应用,或是最佳性能模式,或者你也可以选择简化物体来减少一个3D模型的顶点数、以达到降荷的目的。
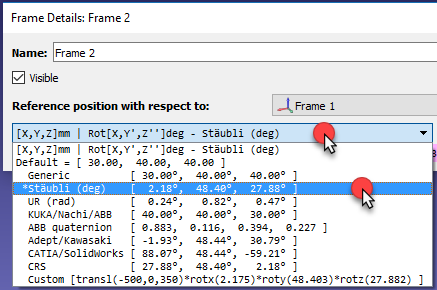
10. 选择欧拉角模式
欧拉角模式是机器人呈现位置和空间方向时所使用的方法。让人头疼的是,在呈现一个坐标系位置时,每个机器人制造商和CAD/CAM软件使用的欧拉角协定都有细微的不同。
而RoboDK支持所有主要机器人制造商所用的欧拉角协定。你可以转换协定或还原为默认设置:工具 > 选项 > 通用。
关于欧拉角公式的完整介绍,请参考我们之前的博客。
无论你的偏好是什么,在RoboDK里通过这些多样的方法,我们相信,你就可以把软件改造成你喜欢的模样。