在投资离线编程之前,你需要确认它是否适用于你的机器人。以下三个步骤能帮助你验证所使用的机器人型号是否适配。
考虑投资离线编程?你可能正疑惑它是否适配自己特定的机器人机型。
在尝试测试多个软件包前,先确认你的机器人是否被支持。毕竟,如果下载、安装并学习了一款新软件后,才发现自己的机器人型号不在支持范围内,那无疑是在浪费时间和金钱。
过去,只有部分机器人品牌提供离线编程选项。每个制造商都开发自己的仿真软件,这些软件或多或少是你进行离线编程的唯一选择。如果你的机器人品牌未提供相应软件,那就只能束手无策了。
如今,市场上有众多可为任何机器人进行离线编程的选择。每年都有新的仿真软件涌现,机器人用户可选择的余地也越来越大。正因如此,每年的选择也变得愈发困难。
最基本的答案
关于“能否离线编程我的机器人?”这个问题的答案很简单:可以!
但实际情况远没有这么简单。
只要你的团队拥有充足的时间和足够的专业知识,理论上可以为任何机器人进行离线编程。问题在于,某些软件会让这一过程变得比其他方案更复杂,因此可行性大打折扣。
要判断你的机器人是否适合离线编程,你需要:
- 寻找能简化(而非增加)机器人编程难度的软件;
- 评估你的特定机型在该软件中的适配程度;
- 亲自试用该软件。
在本文后续部分,我将逐一展开说明这些要点。
为什么有些软件并不适用你的机器人?
你肯定不想耗费数小时甚至数天时间,就为了让机器人能跟某款软件”和平共处”而焦头烂额。
几年前我在攻读机器人学博士学位时,曾尝试过市面上几乎所有机器人仿真软件,试图找出”最优解”。最终我发现这完全是徒劳——没有哪款软件能称得上”最好”,关键要看具体应用场景。不过在这个过程中,我确实深入理解了优秀仿真软件的核心要素。
注意到我这里使用了”仿真软件”这个词。所有离线编程(OLP)本质上都属于仿真范畴。但需要特别说明的是:OLP软件未必是完整的机器人仿真系统。完整的机器人仿真通常包含物理引擎,会尝试模拟整个物理世界——比如在完整仿真环境中创建一个球体,它会自然下落并滚动。
但对于工业级离线编程来说,这种程度的”真实感”往往只会带来麻烦。根据我多年惨痛经验,在开发可靠机器人程序时,”更真实的物理效果”反而会成为噩梦。读博期间,我曾花费大量时间调试物理引擎,远超过实际编写机器人程序的时间。
这些年我总结出一条经验:
你需要的是能精准模拟任务关键特性的软件。
对我们大多数人而言,这意味着需要机器人的运动学建模,有时还需基础的碰撞检测功能。
RoboDK的核心优势就在于:它专注于精确控制机器人运动学,而非模拟复杂物理环境。我认为这正是RoboDK比其他同类软件更可靠、更易用的根本原因。
如何评估你的机器人与特定软件的兼容性?
接下来,你需要为你的机器人建立一个精准的模型。这是决定你使用软件难易程度的关键因素。有了精确的模型,你就可以尝试使用这款软件。
然而,创建一个高质量的机器人模型并非那么容易。
你可以通过以下三种方式来获取机器人模型:
自行创建模型
这通常包括以下步骤,即使对于经验丰富的工程师来说,可能也需要花费几天时间:
- 从制造商处查找并下载机器人的CAD模型。
- 清理CAD模型,使其适合用于运动学控制(例如合并零件,并将每个连杆导出为单独的文件)。
- 学习你所使用的仿真软件所需的运动学文件格式。
- 使用仿真软件正确的公式推导出机器人的运动学模型(例如使用其Denavit-Hartenberg参数)。
- 编写或构建描述机器人的输入文件。
- 将文件加载到仿真软件中,进行测试并修正任何错误。
- 开发或寻找一个后处理器。这个后处理器将生成物理机器人可以理解的指令。如果你长时间找不到适用于你机器人品牌的现成后处理器。RoboDK提供了一个通用后处理器,详情请查看此处。
从其他仿真软件中适配模型
这包括找到一个现有的机器人模型,并将其重新编程以适配你正在使用的仿真软件。这个过程可能几乎与自行创建模型所需的时间一样长,而且你可能仍需自己编写后处理器。
直接使用支持你机器人的仿真软件
这是最好、最简单的选项。使用包含大量机器人型号的软件。你可以在几分钟内将你的机器人加载到程序中,并立即开始编程。
在RoboDK,我们推荐第三种方式。我们理解大多数人没有时间去只是为了测试一款离线编程(OLP)软件包,而折腾运动学文件。
在我们的机器人库中,你可以找到来自超过1000+款机器人模型。
此外,如果你发现你的特定机器人没有在列表中,只需给我们发一封邮件,我们会尽力将其添加到我们的库中,你无需自行处理。
亲自测试软件
我一直坚信,评判一款软件的最佳方式就是亲自试用。
你可以尽情查找海量评测,也可以观看无数教学视频。但唯有当你真正坐下来操作这款软件时,才能判断它是否适合你。
当你将机器人模型导入软件后,不妨尝试编写一个简单任务程序——比如基础的拾取放置操作。
使用RoboDK,你完全可以在几分钟内让程序运行起来。虽然这可能不是世上最优的程序,但至少能证明可行性。
不过我得说明,我并非在过度简化这个过程。
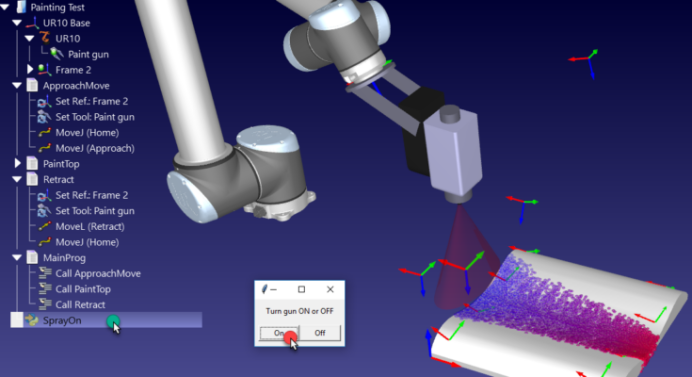
作为测试,我刚完成RoboDK的全新安装并加载UR机器人模型,整个过程仅耗时数分钟。随后我开始编程——为了使时间估算更真实,我在操作过程中同步查阅《快速入门》教程来获取编写简易拾取放置程序所需的信息。最后我将程序导出为UR脚本文件,可直接加载到机器人中。整个流程耗时仅15分钟。
即便考虑到我读取速度较快,只要你的机器人已在机器人在线库中,安装RoboDK后一小时内就能通过离线编程让机器人动起来(假设你的机器人型号已在库中)。
如果这还不能证明离线编程适用于你的机器人,我不知道还有什么更能说明问题!
点击此链接下载RoboDK免费试用版,亲自体验吧!