如果未经过规范标定,大多数工业机器人都达不到精密加工任务所需的精度。机器人标定能够把机器人出色的重复定位性能转化为稳定可靠的绝对定位精度。那么,哪些标定工具效果最好?
标定分为多种类型,分别适配不同的精度需求。一部分标定功能可直接在机器人编程软件内操作使用,还有一部分方案需要额外配备传感测量硬件,或是聘请专业机器人标定服务商提供服务。
无论你只需要基础的工具中心点(TCP)标定,还是整机全参数标定,本文都会提供关键参考,帮你挑选适配自身需求的机器人标定方案。
机器人标定为何至关重要:绝对定位精度与重复定位精度辨析
绝对定位精度与重复定位精度的区分是机器人领域的核心基础,也解释了标定必不可少的原因。

以下是这两个术语的含义说明:
- 重复定位精度——每当控制程序发送相同指令,机器人都会回到同一个位置。举个例子,如果你设定焊枪运动至坐标点 (1,1,1),但机器人实际运行到 (1,2,1),并且每次执行这条指令都会固定停在 (1,2,1)。工业机械臂一般都具备很高的重复定位精度。
- 绝对定位精度——机器人能够精准抵达指令指定的理论坐标。沿用上面的例子,下达焊枪移动至 (1,1,1) 的指令后,机器人实际停留位置正好是 (1,1,1)。工业机械臂通常需要完成标定,才能实现高绝对定位精度。
结合上面这个焊接案例就能发现,将一台重复精度高的机器人变为高精度机器人并不复杂。只需在机器人前往坐标 (1,1,1) 时,叠加偏移补偿值 (0,1,0) 即可。这是对标定原理的简化举例。
是什么导致机器人定位精度偏低?
你可能会想:那为什么不直接造出本身精度就很高的机器人呢?但在实际生产中,这种做法并不现实。
运动学标定相关研究表明,绝大多数定位误差都源于机器人理论模型与实际物理本体之间微小的几何偏差。造成这类偏差的诱因有很多,包括制造公差、零部件磨损以及零件更换等。
这就意味着,机器人若要长期稳定地保持高精度,就必须进行标定。即便一台机器人新机出厂时精度表现优异,随着使用时间推移,本体几何尺寸也会发生偏移,因此需要重新标定。
TCP标定与机器人整机全参数标定:你该选用哪一种?
绝大多数用户并不需要精度等级拉满的机器人系统。机器人标定分为多种方案,不同方案的成本、操作难度各不相同,可根据自身需求选择。
绝大多数场景下,主要有以下三种基础标定方案:
方案一:不进行标定
值得一提的是,部分作业场景无需对机器人开展标定。对于重载码垛、物料搬运、简易上下料这类精度要求不高的粗放型工序,机器人出厂自带的精度就足以满足生产需求。
但要留意,随着机器人机械结构老化,后续大概率还是需要做标定,现阶段可暂时省略标定步骤。
方案二:工具中心点(TCP)标定
对于绝大多数应用场景,简单的TCP标定就完全能够满足需求。该标定方式借助标准现成标定工具,在机器人工作空间内多个点位对工具中心点进行误差修正。
这类标定适用于中等精度要求的作业,例如上下料拾取、表面打磨处理以及焊接加工。
方案三:机器人整机全参数标定
最后介绍整机运动学标定,整套流程分为四个步骤,用于对机器人模型的细微偏差完成建模、参数识别与误差补偿。
激光切割、精密钻孔、三坐标检测等高定位精度要求的作业,必须采用整机全参数标定。
如需了解我方全套标定服务详情,可访问标定服务专题页面。
主流机器人标定工具对比一览
哪种机器人标定方案最优?下表整理了市面上几款常用标定方案,并分别说明其优缺点。
| 工具类型 | 精度水平 | 适配兼容性 | 核心特性 |
| 自动化TCP 标定工具(例:TwinTool) | 精度良好 | 兼容90 余家厂商、1400款以上机器人 | 搭载成熟量产线性测微传感器(三丰、基恩士、Sylvac);向导式三步操作流程;无需编程 |
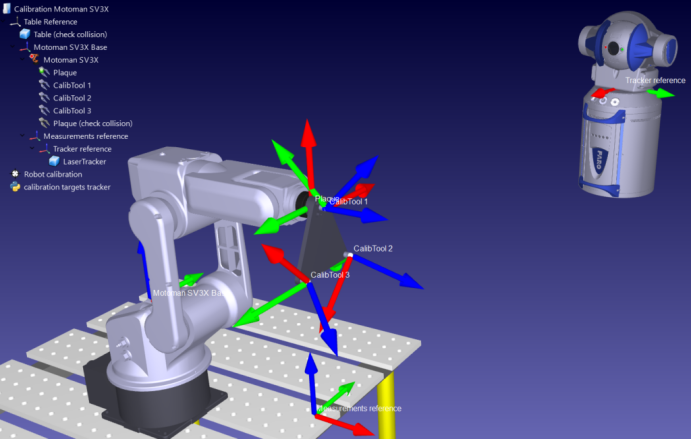
| 激光跟踪仪 | 高精度 | 全机型通用 | 实时追踪末端执行器位置;可完成TCP标定与整机全参数标定;设备成本较高;适用于公差要求严苛场景 |
| 机器人整机全套标定服务 | 最高精度可达0.200 毫米 | 适配1200种以上机器人型号 | 全套运动学标定(共计30项参数);20分钟内完成标定;具备自动防撞功能 |
机器人多久需要标定一次?
机器人标定通常不是一次性工作。它应当纳入常态化维护流程,确保机器人设备始终保持最佳运行精度。
多种因素会随时间推移造成机器人精度衰减,主要包括:
- 零部件磨损——和所有机械构件一样,机器人长期运行会产生磨损,进而导致机器人运动模型参数发生变化。采购二手机器人后必须完成标定,同时还应定期复测精度。
- 零部件更换或维修——机器人但凡经过任何机械结构改动,通常都需要重新标定,例如更换零件、维修受损部件之后。
- 环境变化——温度、湿度等环境因素会对机器人机械本体产生影响(相关研究表明,温度波动造成的误差占机器人整体定位误差的 0.1%)。
- 更换新工具或末端执行器——换装新工具后一般需要进行TCP标定,若该工具用于高精度作业,则标定工作必不可少。
- 更换编程系统——切换全新编程软件也可能需要重新标定。但如果你已存有该机器人标定完成后的运动学模型参数,可通过专用标定工具将参数复制迁移,直接在新软件中调用。
想要妥善应对以上各类影响因素,最有效的方式就是将精度检测纳入机器人日常维护流程。依据检测数据,你就能判断是否需要标定、以及何时开展标定。

如何选择效果最优的机器人标定方案
什么样的标定方案才算最优?能匹配你当前精度需求的方案就是最优解。
很多人都会犯一个通病:明明简单的TCP标定就能满足需求,却投入成本做整机全参数标定。请记住,只需达到对应工序所需精度即可,不必追求更高标准。RoboDK TwinTool这类工具是兼顾成本与性能的理想折中选择。
你可以先检测现有机器人的实际精度;若判断需要整机全参数标定,可了解我们提供的标定服务。