手动精加工操作往往存在不一致性且难以实现规模化生产。当面临劳动密集型的精加工流程时,Automax Robotics Pvt. Ltd公司借助RoboDK软件打造了一套机器人系统,成功解决了这一常见难题。
如果你曾在车间处理过打磨或抛光工作,就会明白那些微小且不一致问题会快速堆积起来。对于手动操作而言,精加工工作体力消耗大,长时间作业下来,工件表面的加工质量很容易出现参差不齐。
Automax Robotics公司和印度国际大厦有限公司(IIHL)对此深有体会。当手动精加工给他们的生产流程带来越来越多的问题时,他们就开始寻求自动化解决方案……
为您介绍…Automax Robotics Pvt.有限公司
Automax Robotics Pvt. Ltd.是一家总部位于印度的创新型先进机器人自动化解决方案供应商。
该公司专注于工业与教育领域的机器人解决方案,致力于重新定义机器人技术的可能性。除了提供工业解决方案外,他们还打造先进的机器人实验室,并开展培训与技能发展项目,帮助团队和学生高效掌握机器人系统的使用。

首席执行官Sagar Mângulkar表示:
“在Automax Robotics,我们不仅致力于自动化,更以目标为导向进行创新。通过将机器人技术的精确性与自适应智能相结合,我们不仅解决当下的挑战,更为未来的智能工厂奠定基础。”
在这个项目中,团队将注意力转向了他们与IIHL合作过程中所面临的一个问题。
客户:硬件制造商—印度国际大厦有限公司(IIHL)
总部位于印度德里的印度国际之家有限公司(India International House Ltd.,简称IIHL)是印度最大的古董修复五金件制造商和出口商,拥有超过40年为国际市场供应高品质精加工金属产品的经验。
作为一家业务遍及全球的企业,该公司的战略目标是通过持续投资现代化机械设备、产品开发和采购能力建设,成为全球最优质、规模最大的精加工金属产品供应商。
IIHL的产品之一是抛光门把手。过去,该团队在门把手的加工过程中采用手工精整工艺,包括从打磨到抛光共四个独立的精加工步骤。这种作业方式不仅劳动强度大,还导致表面处理效果不一致。
为什么手工精加工不满足
国际工业木制品公司(IIHL)的团队正面临一个普遍存在的问题。手动精加工不仅导致效果参差不齐,还产生了生产瓶颈,使得他们难以达成生产目标。
这是手动精加工中常见的问题。无论工人技艺多么精湛,手工表面处理几乎总是会带来一定程度的一致性问题,而劳动力短缺更是加剧了这一状况。表面处理只是家具行业中比较常见的机器人应用之一。
为了进一步扩大生产规模,IIHL邀请了Automax Robotics Pvt. Ltd.(自动化机器人私人有限公司)来重新设计其精加工流程。双方共同发现,通过引入机器人技术进行优化,不仅能够提升产品质量,还为高效扩大生产规模铺平了道路。
解决方案:智能且多站点机器人工作流程
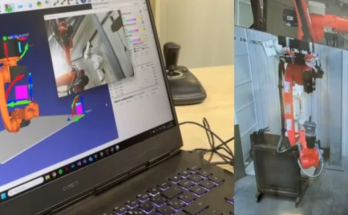
Automax Robotics团队选择围绕一台FANUC工业机器人设计一整套机器人工作流程。该解决方案采用定制化末端执行器,可在四台Lancer磨床上依次对每个零件进行操作。
该系统的目标是确保在减少人工干预的情况下,获得高质量、可重复的结果。
硬件
硬件组件包括:
• 机器人—一台FANUC M-10iD/12工业机械臂
• 末端执行器—一个定制的气动夹爪
• 精加工设备—4台Lancer带式磨床
软件与控制系统
该软件解决方案以RoboDK为核心,支持离线编程与在线编程。
控制组件包括:
• 机器人编程与仿真软件—RoboDK
• 机器人示教器编程—FANUC示教器
• 控制系统—可编程逻辑控制器(PLC),配备气动接口与安全系统
门把手表面处理工艺的应用原理
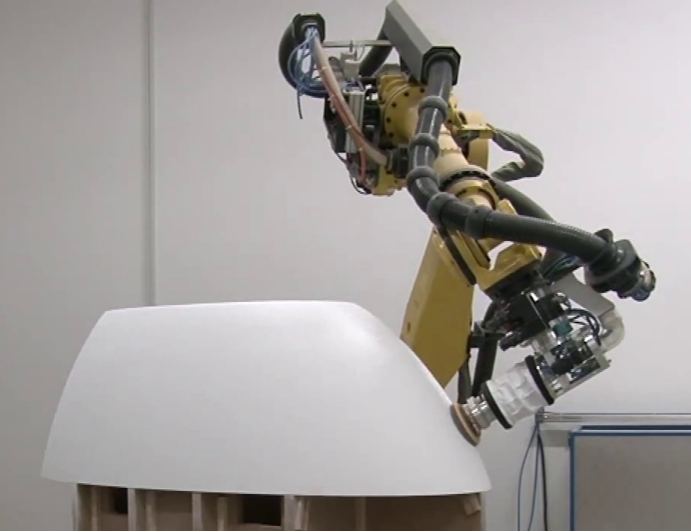
该解决方案实现了门把手的全自动精加工。每个门把手都通过Automax Robotics公司定制的气动末端执行器固定,在全部四个精加工阶段中依次完成处理。
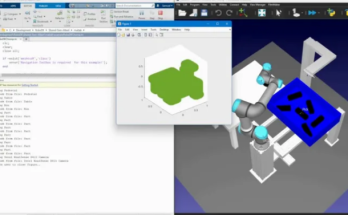
每台设备执行不同的精加工工序,机器人按顺序将门把手依次送入四个研磨工位进行处理。所有运动路径和编程逻辑步骤均在RoboDK软件中预先编程和模拟,随后机器人程序直接上传至设备,确保车间现场精准执行。
该方案的理想用户包括从事多步骤机器人操作的制造商和系统集成商,尤其适用于对精度、一致性和适应性要求严苛的应用场景。
该团队表示:
“RoboDK基于仿真驱动的工作流程,对于那些希望快速迭代并避免在实际系统上进行试错编程的团队来说尤其有帮助。”
下一步是什么?自适应、数据驱动的自动化
当前方案只是一个开端。Automax Robotics团队还计划为其他客户和应用场景拓展这一技术成果。
他们计划首先为FANUC机器人集成四轴力/力矩传感器,以实时捕捉抛光压力。借助RoboDK软件,该系统将能根据抛光工具的受力变化进行动态调整。这将使解决方案在保持表面处理一致性的同时,智能应对工件差异。
团队还计划突破表面处理范畴,将相同方法应用于其他机器人作业场景。他们打算将这一方案推广至未来焊接、涂胶及智能检测等项目中。为实现系统互联,团队将采用自主研发的Smart Connect软件平台。
离线编程可实现现实世界的一致性
Automax Robotics与IIHL的合作,充分展现了机器人自动化在解决常见制造难题方面的强大能力。
通过集成一台FANUC机器人和RoboDK软件,他们打造了一个多工位工作流程,在消除生产瓶颈的同时,实现了门把手表面处理的一致性与高品质。这一创新解决方案不仅应对了生产中的挑战,更为基于RoboDK实现可扩展、自适应的自动化铺平了道路。
如果您曾经面临过人工表面处理方面的难题,不妨下载RoboDK试用版,看看它是否适合您的需求。