在核能行业中,机器人不仅是自动化工具——更是人们手臂的延伸,使操作人员能在危险的辐射环境中开展工作。以下是 Orano机器人团队如何运用RoboDK验证其核领域遥操作数字孪生系统的案例。
遥操作指操作人员在安全区域远程控制机器人。操作者通常只能通过摄像头和传感器获取远程环境的视觉反馈,有时会辅以触觉反馈。这种有限的视野会导致动作判断困难,可能引发碰撞或任务失误。
这正是全球核燃料采矿、浓缩、循环利用及退役服务领军企业 Orano公司试图通过RoboDK解决的难题。
该项目具体实施流程如下……
ORANO机器人公司
Orano是国际公认的核燃料循环领域专家。该公司致力于开发突破性解决方案,以提升复杂核能作业的安全性、效率与精准度。
Orano机器人公司专注于为核设施退役、检测及维护提供尖端技术。其系统涵盖移动机器人、机械臂等robotic硬件,以应对核能行业中的各类挑战。
在此次项目中,团队致力于解决核能远程操作中的共性难题——物理机器人可视性缺失的问题。
挑战:突破操作者的视野局限
远程操作是一种将人类纳入控制系统的机器人技术,即由操作者远程操控机器人执行任务。这种”人在回路”的技术模式在人类无法亲临的危险环境中不可或缺。
以核工业为例,高强度辐射使得人工检修无法实施,而任务的复杂性与不可预测性又让全自动化方案难以胜任,由此远程操控机器人成为唯一可靠的解决方案。
但远程操作技术面临着独特挑战。
传统操控系统主要依赖摄像头为操作者提供视觉反馈,这类系统不仅视野受限,还存在画面延迟问题。由于无法直接观察机器人,操作者难以实时掌握机械臂的精确运动轨迹。
这意味着操作者需要极高技能才能完成作业。即便是经验丰富的操作者,也常难以精准判断距离和方位。一个细微的动作误判就可能导致工具损坏或设备碰撞。
解决方案:利用RoboDK构建实时数字孪生系统
奥拉诺团队提出一项创新方案,将RoboDK的实时数字孪生技术集成至现有人机交互界面中。
奥拉诺公司的工程师恩Ndiaye Hamedine解释道:“我们的目标是为操作员提供清晰的人机界面,实时显示机器人在工作环境中的位置,同时管理功能安全防护机制,并确保系统独立于机器人制造商。”
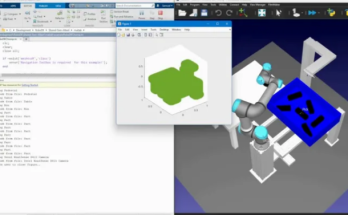
该系统在仿真环境中使用机器人虚拟模型,该模型会通过物理机器人的实时数据持续更新。操作人员可以在仿真界面中观察机器人运动,除实时摄像头画面外,还能获取其位置与姿态的辅助信息。
应用的核心功能包括:
- 精确三维工作区建模——团队导入远程工作区与库卡机器人的STEP文件,确保关键系统要素的精准还原。
- 实时关节位置获取——RoboDK的实时双向通信功能使仿真系统与库卡控制
- 实现数据交互,通过控制器获取关节角度并转化为仿真环境中的实时运动。
- 碰撞检测——借助RoboDK内置的碰撞检测功能,操作人员可在虚拟工作区内全面监控机器人运动,避免真实环境中的碰撞风险。
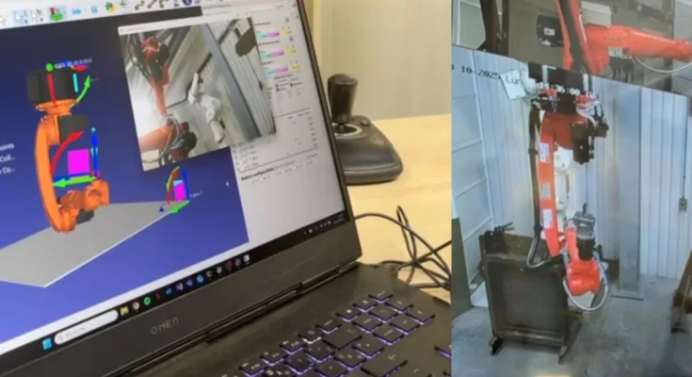
Hamedine表示:“RoboDK使我们能够验证库卡机器人的数字孪生系统,实现物理设备与仿真平台间的实时同步,这在工业场景中充分证明了混合监管模式的可行性。”
系统架构:硬件与软件集成
为构建这套远程操作系统, Orano团队将现有的自动化组件、强大的机器人编程软件以及定制化脚本进行了整合。
硬件组件包括:
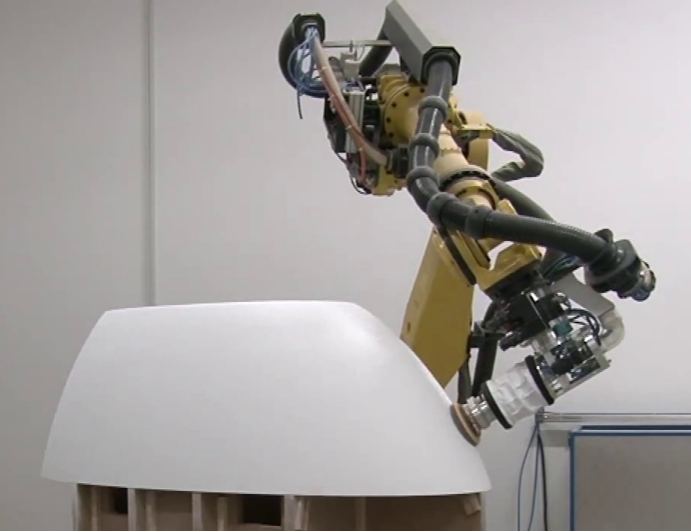
- KUKA KR20 R1810机器人——这款六轴工业机械臂满足了重复定位精度和高刚性,适用于核应用场景中的远程操控。
- KUKA控制器——该机器人控制器既可处理由系统人机界面发送的远程操作指令,也能将实时关节位置数据传送至RoboDK仿真系统。
网络摄像头——该摄像传感器可从工作区捕获额外视觉反馈,用于实时操作及录制核验。
软件组件包括:
- RoboDK——RoboDK图形化环境提供实时可视化、数字孪生建模与碰撞检测功能,为操作人员提供辅助支持。
- Python脚本——这些定制程序执行团队控制逻辑,并实现KUKA控制器与RoboDK之间的通信。
- OBS Studio——该软件充当桥梁工具。由于RoboDK仅原生支持USB摄像头,OBS用于将IP视频流转换为虚拟摄像头信号。
这种模块化组合确保了系统的灵活性,并为未来软件开发预留了扩展空间。
成果:更安全、更智能的远程操作技术
通过该系统,团队构建了一套功能完备的远程操作系统,将视觉反馈与数字孪生技术相结合。即使操作者无法直接观察机器人,也能在放射性环境中执行任务。
通过RoboDK创建的数字孪生模型能清晰呈现机器人在环境中的位置,确保操作安全精准。操作人员可实时监测实体机器人的运动轨迹,即使在机器人完全不可见的情况下,也能主动检测碰撞风险,以更高效率执行操作,最大限度减少误判概率。
在此验证项目取得成功后,Orano团队计划进一步拓展数字孪生与远程操作技术的融合应用,重点聚焦于对防碰撞能力要求极高的场景,包括巡检巡检、设备维护及搬运作业等领域。