虚拟调试正在成为在制造中加入机器人的关键工具。但是碎片化的硬件可能会产生阻碍,而这就是UNIMORE的PeneloPe项目所解决的问题。
虚拟调试的兴起对RoboDK来说并不奇怪——在过去的十年里,我们一直在推广使用虚拟仿真技术进行机器人部署!
机器人部署中的一个关键挑战是硬件组件之间缺乏集成。可编程逻辑控制器(PLC)和机器人控制器之间的碎片化就是一个很好的例子。
UNIMORE的研究人员正在使用RoboDK来弥补这一问题,这是也是欧洲PeneloPe项目的一部分。
UNIMORE和PeneloPe
此RoboDK项目涉及摩德纳大学和雷焦艾米利亚大学(UNIMORE)工程科学与方法系(DISMI)的研究人员。
UNIMORE
位于意大利摩德纳的摩德纳和雷焦艾米利亚大学位于工程原理与实际应用相结合的前沿。DISMI研究任务的其中之一就是将研究知识转移到社会和商业环境中。
PeneloPe
PeneloPe项目由欧洲地平线2020计划资助。它由专门从事可持续性、自动化和其他制造技术的合作伙伴公司的协作网络提供支持。
该项目旨在通过开发闭环数字通道来彻底改变制造业。UNIMORE团队是则是负责将工业机器人集成到这个数字通道中。
挑战:协调PLC和机器人控制器
部署机器人系统时的一个常见挑战是硬件组件之间的碎片化。这种标准化的缺乏通常会使集成机器人技术的过程复杂化——事实上,解决这个问题是我们RoboDK的核心之一。
UNIMORE的研究人员确定了一种通常具有挑战性的特定硬件组合:PLC 和机器人控制器。
在这项研究中,该团队指出,这两个组成部分之间的有效协调至关重要。制造商经常面临缩短上市时间的压力。但是,当组件由不同品牌制造时,集成可能既困难又耗时。
该团队致力于创建用于仿真多品牌机器人系统的统一方法和软件工作流程。
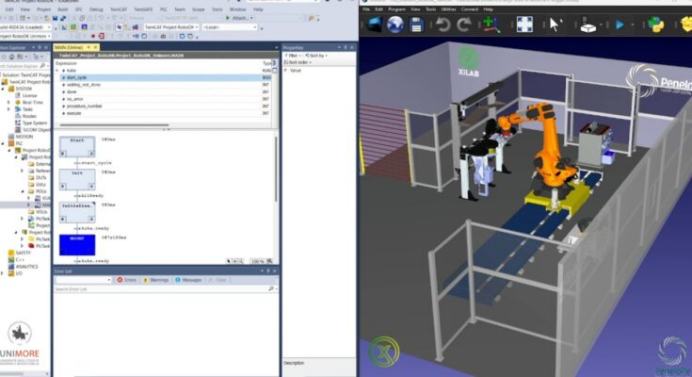
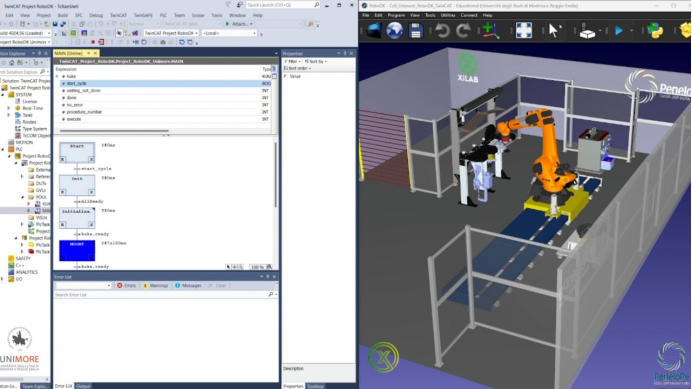
系统:RoboDK、KUKA以及TwinCAT
研究人员创建的解决方案将一些核心硬件和软件组合到一个集成系统中:
硬件组件
核心硬件组件包括:
库卡KR210 R2700 Prime机器人——这款来自KUKA的多功能工业机器人为该解决方案提供了核心机器人硬件。
工具库——工具库为生产过程的各阶段提供了一个井井有条的空间,并可以快速访问多种工具。
主轴工具——主轴用于团队对于去毛刺等加工操作的测试用例应用。
软件组件
该系统的核心软件组件包括:
RoboDK模拟器——该解决方案的核心是RoboDK。除了强大的离线编程和仿真功能外,RoboDK还提供了允许多品牌组件兼容性的关键功能。
Beckhoff TwinCAT——TwinCAT用于PLC开发,为创建工业程序和处理数据交换提供了平台。
ROS2连接器——该团队还开发了该系统的增强版本,使用机器人操作系统(ROS)作为系统协调器。
Python通信桥——该团队使用Python编程语言开发了一个通信桥,以使用TwinCAT来管理RoboDK和PLC之间的实时I/O信号同步。
该解决方案的5个潜在好处和影响
UNIMORE团队提出的解决方案为希望部署多品牌自动化解决方案的制造商提供了几个潜在的好处,包括:
更高的效率——为PLC和机器人通信创建单一的组合系统意味着更加简化和高效的机器人部署。
降低成本——通过RoboDK和系统进行虚拟调试,允许工程师优化仿真,减少停机时间,从而降低了机器人集成的成本。
加快上市时间——通过简化PLC和机器人控制器之间的协调,该系统可以加快将新解决方案推向市场的时间。
提高灵活性——互操作性通常是自动化工程师面临的挑战,而,专注于多品牌自动化解决方案解决了互操作性的核心挑战。
更广泛的应用——此方案的测试应用是铸铁部件的去毛刺。但是,它可以应用于更多应用。作为PeneloPe项目的一部分,该团队已经在努力将其用于航空航天试验线。
项目的下一步
UNIMORE团队的这个项目为PeneloPe项目的未来发展提供了核心基础。通过其ROS2集成,该团队希望为任务协调和系统管理开辟新的途径,以提升该工具的功能。
在PeneloPe项目中,下一步是将该系统应用于航空航天飞行器生产线的制造,该生产线解决了飞机机身下部的组装问题。
在您的项目中使用RoboDK
您是否有可以从RoboDK的广泛功能中受益的项目?
UNIMORE团队的这个项目只是使用RoboDK的众多机器人研究项目之一。
RoboDK一直是PeneloPe项目中的核心工具之一,使我们能够从初步阶段开始有效地模拟定制机器人单元及其完整的控制软件。它与外部软件的轻松集成允许更快的开发和调试,UNIMORE机械工程教授Pietro Bilancia说到:
该软件的简洁界面和强大的API接口允许您通过自己的开发来扩展软件的核心功能,避免重复工作。
如果您想试用 RoboDK,只需下载免费试用版并亲自试用即可。我们还为学术研究人员提供了教育许可证。