Which pick and place tasks are the easiest options to get started?
Are some pick and place tasks more difficult for robots than others?
What task is the best for your situation?
We will discuss the 10 perfect pick and place tasks for a robot.
It’s not always easy to tell which tasks you should do first with a robot. Often, we have many tasks that could be automated. But, we might not be sure which is the most suitable for robotic automation or which task will give us the most bang for our buck.
Pick and place is by far one of the most popular tasks for people starting out with robotics. With that being said, even experienced robot users find themselves deploying more pick and place tasks than other types.
There are many potential pick and place tasks.
Which one is the right one for you?
In this situation, we may have a tendency to rush into a decision. We might assume that we know which task is the best one to automate first (and maybe we do). However, we forget to take a full assessment of all the potential tasks that we could automate. In our rush, we miss one or two “quick wins” — tasks that could give us a quick return on investment with an immediate impact on our operations.
To help you to identify which tasks could be suitable for you, these 10 pick and place tasks are often a good place to start:
1. Stacking
A simple pick and place task is to program your robot to stack parts that come off a production line or from a previous operation: This is a great example of a non-value-added task and is therefore perfect for a robot.
With that being said, an example of a stacking task could be where you have a semi-automated sequence of operations before the robot but you will perform some manual operations on the parts afterward: The robot would stack the parts like a buffer.
2. Sorting
A great pick and place task is to sort different objects into separate piles or onto separate conveyors. This usually requires robot vision to detect the various object types. However, this is not always the case; Sorting can also be combined with other tasks, such as packaging, to allow the robot to sort parts as it moves them to the next stage in their operation.
A very common example of a sorting task is to use a high-speed delta robot to remove defect parts from a moving conveyor.

3. Packaging
Packaging consists of picking objects from one part of the workspace and placing them into a box, tray, bag, or another packaging container. It is probably one of the most common pick and place tasks. Robots are suitable for both types of packaging tasks: primary packaging (containing the raw product) and secondary packaging (containing already packaged products).
An example of a packaging task is to pick finished products from a moving conveyor and arrange them into an open box.
4. Bin Picking
Bin picking is less of an application area and more of an advanced approach to pick and place. In other words, it involves detecting unsorted objects that are arranged in a pile, bucket, or bin. The robot’s sensing systems are advanced enough to be able to detect the location and orientation of the cluttered objects.
As a result, an example of a bin picking task is to detect unsorted, unfinished parts in a tray and arrange them for a finishing operation.
5. Quality Control
Pick and place is often used in quality control tasks immediately following an inspection step. The inspection system identifies which products are defect and the robot moves them into a location for rework or rejection.
An example of a quality control task is in food manufacturing where the robot removes broken cookies from the production line.

6. Palletizing
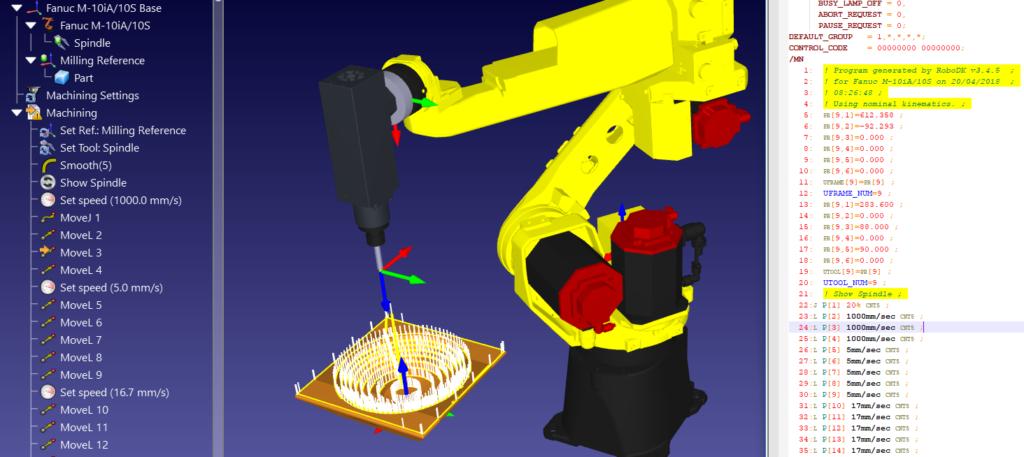
Palletizing is a very specific type of pick and place task that involves arranging packaged products or other objects onto a pallet or tray. The key difference with palletizing is the structured pattern in which the parts are arranged. Palletizing programming tools (such as the one in RoboDK) make it easy to create the required pattern on the pallet.
An example of a palletizing task is arranging casks of beer onto a pallet for shipment.
7. Depalletizing
A similar task to palletizing, depalletizing simply means taking items off a pallet and placing them in a way that is useful for the next stage in the process. It is common when you receive parts or raw materials from a supplier and need to feed them seamlessly into your automated or semi-automated process.
An example of a depalletizing task is taking sheets of metal from a pallet and feeding them into another fabrication step.
8. Machine Tending
Many robotic applications involve using the robot to assist other autonomous operations, machine tending is a perfect example of this. This involves picking objects from a pile, bin, or conveyor and placing them into a machine (e.g. a CNC machine). When the machine’s operation is finished, the robot removes the finished parts.
An example of a machine tending task is moving finished products in and out of a product testing machine.
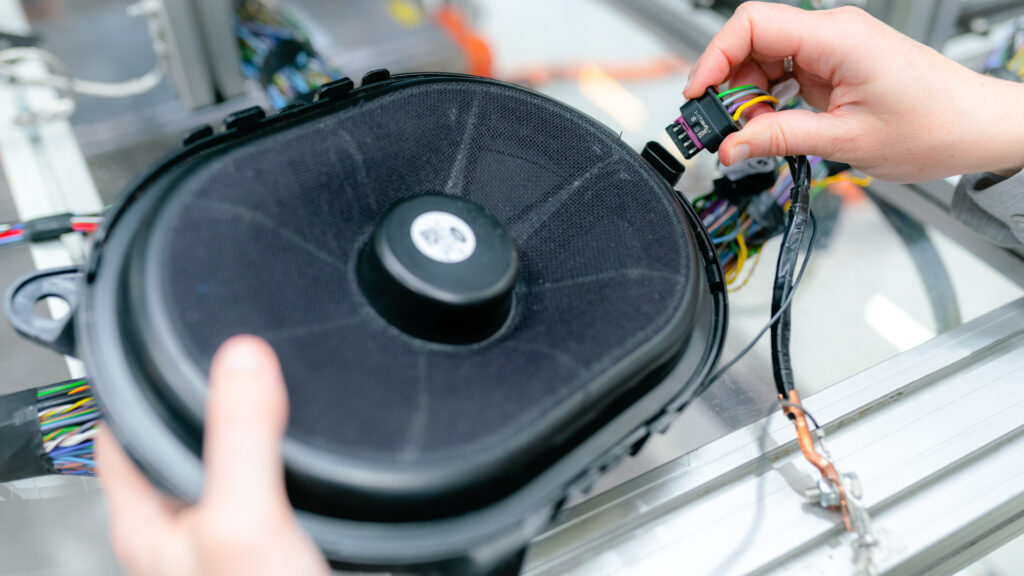
9. Assembly
Assembly is a completely different type of robotic task, involving actions such as insertions, alignment, and screwing. However, some assembly actions are just simple pick and place tasks. You need to move objects next to each other and another robot or machine finishes the assembly action.
An example of a pick and place assembly task is placing surface mount electronic chips onto a circuit board.
10. Arranging
Finally, many pick and place tasks involve some level of arrangement — any time the robot puts down an object, it is arranging it in place. But, you can also take arrangement as a stand-alone robotic task where the only job of the robot is to place the objects in a good layout for another task.
An example of an arranging task is to place parts in the right order on a tray before they move onto a heat-treatment operation.
Whatever type of pick and place task you choose, the programming should not be a difficult step. Check out our webinar on how to program pick and place tasks for practical instructions.
What pick and place task do you have in mind? Tell us in the comments below or join the discussion on LinkedIn, Twitter, Facebook, Instagram, or in the RoboDK Forum.