You want to ensure that your robot application is safe… so would a cobot be the best option? Collaborative robot safety is not as straightforward as you might think.
When you are working with any industrial machinery, safety is a prime concern. Although the number of injury cases is generally low, this can only be because we continue to prioritize safety so highly.
Collaborative robots (aka cobots) are a specific type of robot that has become more popular in the past 10-15 years. Cobots hold the promise that they are inherently safe… but is this true?
There are a few things you need to know about collaborative robot safety before you can safely start to use cobots in your business…
Do Collaborative Robots Need a Safety Fence?
The much-advertised benefit of collaborative robots is that they don’t require a safety fence.
Robot safety fences can be a nuisance. They are large, bulky, awkward to install, and steal a lot of valuable real estate from your facility floor. As a result, it would be great if you could dispense with safety fences completely and just use the robot without one.
But, can cobots really operate without a safety fence?

The basic answer is… yes.
Cobots can operate without a safety fence, but only in specific situations.
It’s not true that you can dispense with fences completely with cobots. There are plenty of applications that require extra safety measures no matter what type of robot you are using. Even if you don’t need a fence, you might need extra safety sensors to ensure your robot meets the required safety standards for your application.
The Important Collaborative Robot Safety Standards
What safety standards do you need to become familiar with when you are using collaborative robots?
There is one main international standard for cobots. Then, there will be country-specific guidelines and recommendations depending on where you are in the world.
ISO/TS 15066 — Collaborative Robots
The main standard that you need to know about collaborative robotics is ISO/TS 15066. This standard was first released in 2016 by the International Standards Organization (ISO).
It specifies the safety requirements for collaborative industrial robot systems and guidance on the safe operation of cobots. A robot that has been manufactured in accordance with this standard will include specific features to aid safety, such as integrated safety sensing, speed limits, and force limits.
Country-specific Robotic Safety Guidelines
As well as cobot safety standards, your robotic applications will also need to adhere to your country’s specific guidelines for working with robotic equipment.
These guidelines are unlikely to address collaborative robots directly (although they might) but they will give you actionable advice on how to ensure your robot application is safe.
For example, in the United States of America, there are two sets of guidelines that are relevant
- NIOSH Guidelines for Robot Safety — These are published by the research agency National Institute for Occupational Safety and Health.
- OSHA Robot Safety Guidelines — These are the legal requirements for workplace safety in the USA, published by the Occupational Safety and Health Administration.
5 Questions to Determine If you Need a Robot Safety Fence
A key decision you will make when deploying a new robot to your facility is whether you should add a safety fence or safety sensors.
With conventional industrial robots, the answer is almost certainly — Yes. There are very few applications where non-collaborative robots are safe without a fence or sensors. With collaborative robots, you will need to ask yourself a few questions to determine if you need safety fences or sensors.
Some useful questions are:
- Is the robot holding a dangerous object? Even cobots can’t be safe around humans if they are holding a dangerous object. For example, if the cobot is manipulating heavy items that could easily fall and hurt someone, or if the item is sharp, or chemically dangerous, it will likely require extra safety measures.
- Is it moving faster than the safe speed? Cobots have a designated safety speed limit. This is why they often seem to move slowly. You can surpass this speed limit to improve task performance, but a safety fence will likely be required.
- Could items slip or move in its grasp? If the robot is manipulating items that could slip and fall, this is a sign of potential danger. The level of risk will depend on the type of object that is being manipulated.
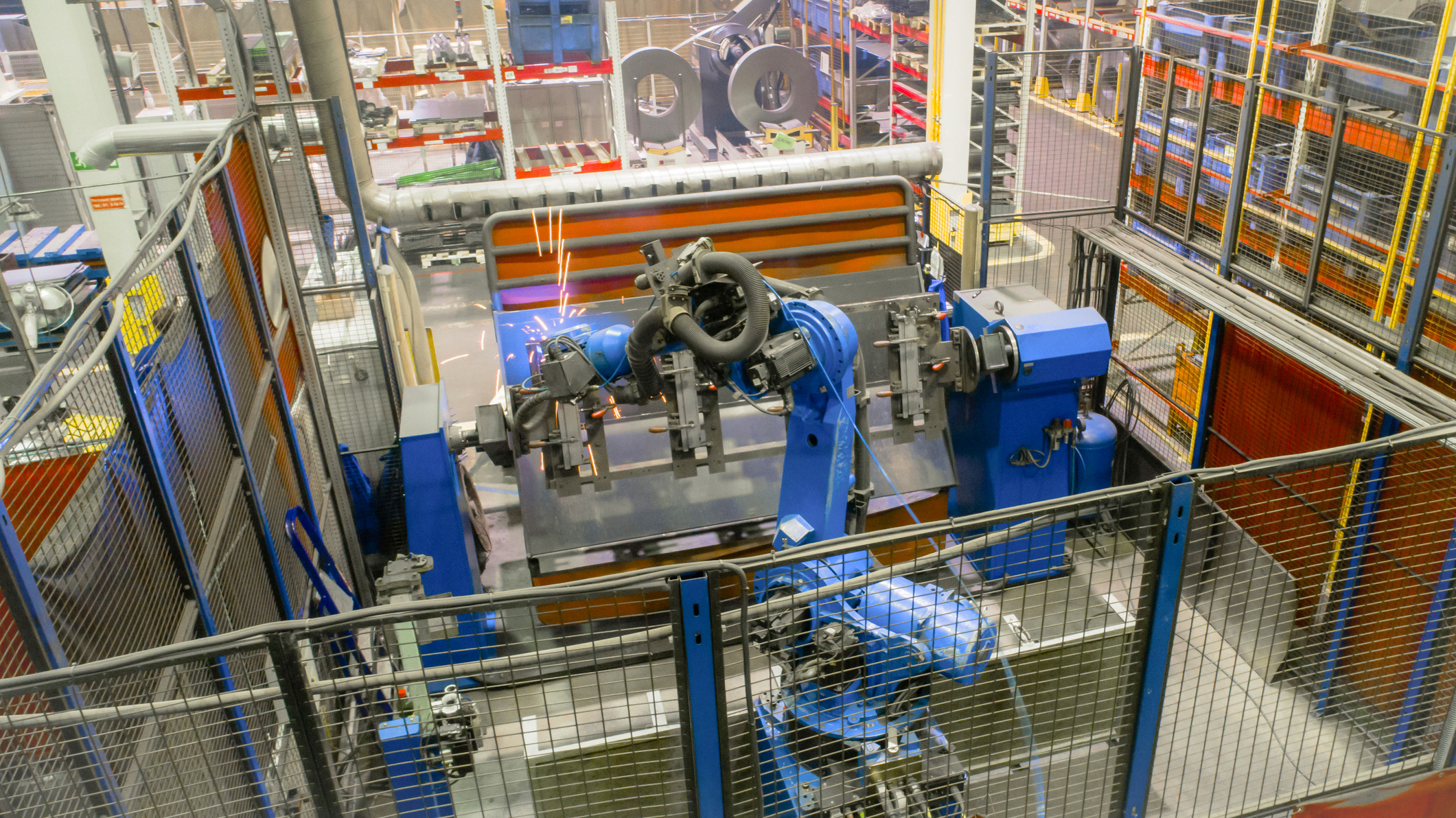
- Is there a dangerous end effector? It’s possible to use collaborative robots for more dangerous process tasks, like welding or painting. In this case, the end effector itself is a hazard so safety measures are required.
- Have you done a risk assessment? All robot applications require a risk assessment, whether they are collaborative robots or not. With cobots, this is especially important as the assessment will help you determine whether measures like a safety fence are needed.
How to Conduct the Design and Deployment for Cobot Safety
When is the best time to start thinking about cobot safety?
The basic answer is… as soon as possible. Even before you purchase a cobot, you should be thinking about the safety implications of your specific application.
If it turns out that your task requires a safety fence, it could suggest that other types of robots are also suitable. Similarly, by considering a cobot rather than another industrial robot, you may find that you don’t need a safety fence.
There are two main phases where cobot safety is useful to think about:
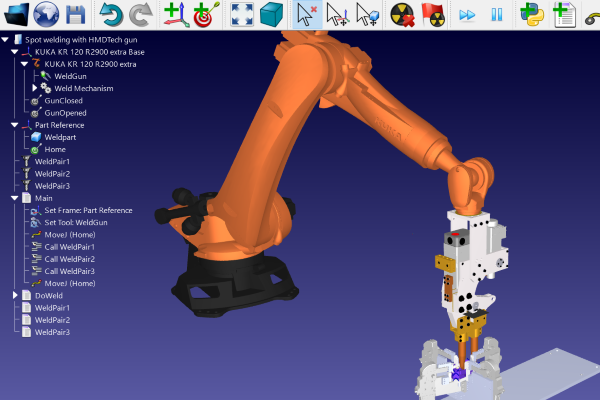
- Design — In the design phase, you will want to assess the task for any potential risks. You can try out different robots and configurations in a robot simulator to identify the causes of any risks and mitigation strategies.
- Deployment — During the deployment itself, you will want to recheck the risk assessment that you performed during the design phase and identify if anything needs to be changed or updated.
Maybe you will need a safety fence or maybe not. The only way to find out is to be conscious of safety issues throughout the design and deployment of your robot cell.
When you identify potential cobot safety issues early, you can mitigate them without it impacting the productivity of your robot.
What aspects of cobot safety concern you? Tell us in the comments below or join the discussion on LinkedIn, Twitter, Facebook, Instagram, or in the RoboDK Forum.