众所周知,使用机器人可以增加生产时间。但如果稍不留神,机器人编程反而会缩短生产时间。想要节省时间,从你的机器人身上获得更多的收益,机器人离线编程软件则是一个相当不错的选择。
时间,是我们真正有限的资源。只要你的工作或生意还在正常运转,那么几乎其他所有的资源,都可以通过购买、借贷等方式获得。但是,据我所知,一天只有24小时。
在过去,我们每天生产的时间远远无法达到24小时。在过去,所有的操作都是纯人工的,这就意味着我们总要在这样或那样的事情上,比如休息、犯错以及其它头疼的事情上浪费大量的时间。
有了机器人,你的生产时间就可以延长到几乎一整天。然而,这只有当你的机器人正常运行并且高效执行生产任务时才能做到。
这里有三个基本的时间损耗会减少机器人的有效生产时间:
- 初始设置时间——设计机器人单元后启动并运行至初始位置的时间;
- 编程时间——编写新程序并输送至机器人的时间;
- 切换和更改的时间——为新产品更改机器人设置或更改现有产品后为机器人升级程序的时间。
离线编程则可以帮助你解决这三个时间损耗。例如RoboDK这种软件可以简化机器人的编程时间,并且提高机器人单元的效率。
这里有10条不错的方法来通过离线编程机器人来节省时间:
1 缩短初始时间
很大一部分不能由于生产的时间其实是被第一次设置机器人单元占据的。安装机器人硬件、设置夹具、校准软件等工作会消耗大量的时间。然而,安装硬件所需的时间在一系列安装设置流程里占用的时间往往不是最长的。
通过传统机器人编程(如使用示教器)来整合软件会耗费掉大量的时间。而使用离线编程软件,就可以让你在安装机器人甚至购买机器人之前,对机器人进行编程!这样你就在机器人安装完成的第一时间将程序输出到机器人上。这可以显著地缩短初始时间。

2 加快选择机器人的时间
选择一款合适的机器人往往并不容易。在设计单元时,你不一定需要知道哪些机器人规格是你需要的。离线编程软件可以通过让你在同一个任务下测试不同的机器人契合度来缩短选择机器人的时间。你可以通过RoboDK机器人库来比较不同机器人的优缺点。
3 加快编程时间
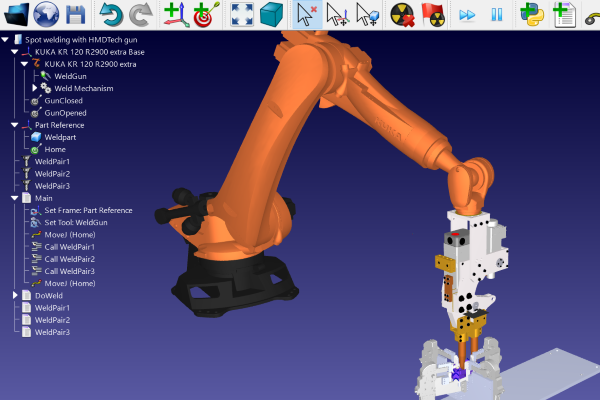
离线编程要比在线编程快得多,尤其是在处理如焊接等繁重的任务编程上。正如《Fabricator》杂志所说:“离线编程在焊接任务中要比绕着零件慢慢转圈的机器人快得多……离线编程软件可以使编程和实施所需的时间缩短数周。”这就意味着你可以非常快速地使机器人开始工作。
4 快速调整程序
传统机器人编程软件在debug和升级上十分令人头疼。即使是一个小小的改变,也需要至少数小时的时间来重新编程。而离线编程软件可以是你快速地调整程序直至正确。这就可以为你的机器人节省出来大量原本用于debug的时间。
5 缩短报价时间
作为工程师,我们通常将关注点放在一项科技在操作上的优势,不是吗?
我们通常会问:“这款软件可以使我的工作更容易吗?”“我可以通过这款软件制造更多的产品吗?”
然而,我们偶尔会忘记考虑科技对其他行业的冲击。例如,离线编程软件可以轻易地为工作提供快速、准确的报价。我们可以通过软件准确地判断出这任务是否可以通过我们的机器人来完成,并且得知所需要的时间。这样我们就可以得出这项任务需要花费的金额。
6 为高度混合的产品提供快速改变
根据Deloitte在2015年的一项消费者调查中得知,定制化正在改变人们购买产品的方式。消费者和商家开始考虑个人定制化项目并且乐意为其支付额外的资金。
这对于机器人使用者来说是一个好消息。如果你进行编程,机器人本身是没办法使用的。然而,在很多编程软件上,重新编程会耗费大量的时间。
有了离线编程软件,你可以先更新程序然后再输出至机器人。这就减少了转换的时间,并且让定制化的可行性更高。
7 重复利用代码
当你在重新编程时,一些与原来相同或者相似的功能或代码的重新编写会占用大量的时间。例如,当你在两台不同的机器人上编写相同的功能时。如果可以在对一个机器人编程完之后,直接将程序转换到另一台机器人上,会不会更好一点?
奥克兰大学的研究员曾这样讲到,传统上,机器人生产商的编程语言各不相同,这是一个很大的问题。对于不同制造商的机器人,必须从零开始编程相同功能的程序。
而对于一些离线编程软件,如RoboDK而言,代码的重复利用会变得更加简单。
8 快速切换至另一台机器人
想象一下,你有一个拾取—放置的需求。用机器人将一个满载的、320kg的托盘从一个传送带上放到另一个上面。
你用了很长的时间去选择一款合适的机器人,最后确定使用可以承载450kg重量的ABB IRB 650型号的机器人。
你用了很长时间去使用ABB的RAPID编程语言来编程,并且将程序调整合适之后,输出至机器人上。
然后,你的需求变了。
你突然不需要移动320kg的托盘了,你需要移动1100kg的托盘。但是远超了这款机器人的上限。你开始寻找其它合适的机器人,最后发现只有一款可以承载1200kg的KUKA KR 1000 Titan机器人符合你的需求。
这是否意味着你需要从零开始了?这是否意味着你需要放下手中的任务来重新使用KUKA的KRL编程语言来重新编程了?
有了像RoboDK这样的离线编程软件之后,你就可以以你之前的代码作为新程序的起始,这样就可以使新的机器人迅速地投入使用。
9 减少停机时间
实现这一项很简单。非常简单。
通过离线编程你的机器人,你可以实现在机器人工作的同时解决代码中出现的问题。
这就带来了更短的停机时间。
很简单吧。
10 减少循环时间
虽然不是那么简单,但是同样重要的是,离线编程可以帮助你减少机器人的循环时间。
怎样实现?这就是上一点的延伸了。离线编程与停机时间不冲突,这就意味着你有更多的时间来调整程序。
使用在线编程的话,每分钟的停机都意味着生产的损失。而使用离线编程来运行程序就没有那么大的压力,你就可以花费必要的时间来优化程序。程序的优化就意味着更短的循环时间。
如果你现在有时间的话,来亲自试试离线编程吧
只有亲自尝试才能更好地体会到离线编程带来的优势。如果你现在有时间的话,你可以点击此处来下载一个试用版的RoboDK软件。
如果你现在时间不充裕的话,你可以在我们的案例页面查看一些关于我们演示程序的视频。


One Comment on “10种用离线编程节省时间的绝佳办法”