
使用RoboDK对工业机器人与传送带进行动态仿真
在工业机器人应用中,使用机器人代替人力取放物件是最常见的任务类型之一,这类型的自动化任务经常需要使用到传送带。而给机器人编程时,传送带的动态变量给编程与仿真带来复杂性,因此机器人传送带的仿真往往很有挑战性。今天,我们给出一些建议来帮助用户实现这一任务。
继续阅读工业机器人应用从未如此简单
在工业机器人应用中,使用机器人代替人力取放物件是最常见的任务类型之一,这类型的自动化任务经常需要使用到传送带。而给机器人编程时,传送带的动态变量给编程与仿真带来复杂性,因此机器人传送带的仿真往往很有挑战性。今天,我们给出一些建议来帮助用户实现这一任务。
继续阅读
使用“高阶”语言给工业机器人编程有很多好处。那么,哪种语言更适合于机器人编程呢——是 Python, C# 还是 MATLAB?
继续阅读
工业机器人可以通过多种办法实现编程,如何在各个选项中找到最好的办法?这里是我们提供的“傻瓜”指南。
继续阅读
很多人对机器人焊接有误解,认为很难实现从人工焊接到自动焊接的跨越。但是事实上,机器人焊接可以通过简单的步骤完成。今天我们简单介绍一下机器人焊接的5个好处以及如何通过5个步骤实现完美的机器人焊接。
继续阅读
RoboDK是如何得名的?你分不清SDK跟API的区别吗?
继续阅读
使用工业机器人完成机器加工?机器人可以与数控机床媲美、被用于机器加工任务吗?今天我们就对制造业中传统的机床加工,与新兴的工业机器人加工进行比较。
继续阅读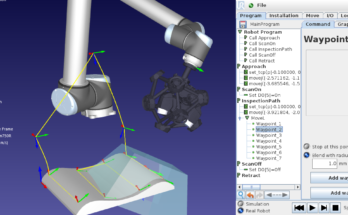
优傲(UR)机器人作为新兴工业机器人品牌,自面世后就以其简单易懂的操控性征服了轻型及协作型机器人应用市场。这在很大程度上归功于优傲示教器上自带的用户图形编程界面,即Polyscope。用户可以通过直观的操作,示教机器人路点(Waypoints)的位置。
继续阅读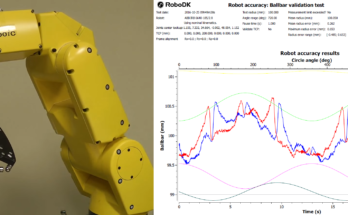
为了保证离线编程的准确性,我们今天介绍一下工业机器人应用中涉及到的各种校准(Calibration)与测试功能。
继续阅读
关于工业机器人离线编程,有的用户会有另一个疑问:离线编程实现的任务很难保证准确的机器人位置,是这样的吗?今天我们来介绍一下是哪些因素影响了机器人任务的准确性。
继续阅读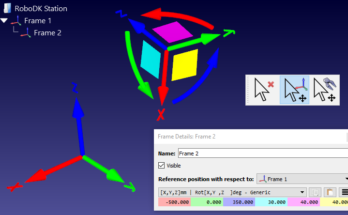
在机器人学习中,几何旋转可以说是其中的难点之一。提到旋转,就不能不提到欧拉角表达方式(也会涉及到其他的表达方式例如四元数),在这里,我们希望这篇基础知识能帮你更好地理解空间旋转。
继续阅读
至今为止,大部分的工业机器人应用都由工程师通过“在线编程”的方式完成。作为机器人的用户(企业),你可能已经习惯了每次花上几个小时甚至几天时间在机器人控制器上编译、调试出新的程序,或者直接预约集成商上门服务。在充分了解机器人离线编程功能之后,你还会这样做吗?
继续阅读
你了解广义的机器人跟工业机器人有什么区别吗?工业机器人的定义是什么,有哪些类型?科普漫谈带你走近工业机器人。
继续阅读