我们提到过,工业机器人可以帮助用户完成多种生产加工工艺。今天我们就介绍一下由来自芬兰的工程师们制作的机器人磨边工序,用于对冰上曲棍球棒的加工。我们从来都不知道,原来曲棍球棒有这么复杂的加工过程!
你了解冰上曲棍球(又称冰球)运动吗?这项运动对球棒的制作要求非常复杂。我们的用户案例来自于芬兰的机器人集成服务商,Sunrob Robotics,他们拥有20多年的从业经验,专门为用户提供库卡(KUKA)机器人的整体解决方案。他们与我们联系,展示了他们利用RoboDK实现的机器人打磨工作台。
制作冰上曲棍球球棒的工艺
在芬兰,冰上曲棍球是最热门的运动。巧合的是,它也是RoboDK总公司所在国家——加拿大最受欢迎的运动!

好的冰球球棒需要同时具备坚固并富有弹性这两个特点。在比赛中,它们需要承受超过110磅(相当于490N)的力量。市面上有各种材料制作的球棒,包括使用木头,石墨烯,玻璃纤维。不过,在职业比赛中最常见的球棒一般是由混合材料做成的——它的中间是实心的塑料,外层包裹了一层又一层的玻璃纤维或者碳纤维。
基本的(我们这里只做简要的描述)混合材料球棒制作工序是这样的:
- 在塑料(例如ABS材料)中将球棒的实心形状切割出来。
- 用玻璃纤维层或者碳纤维层将实心材料一层层包裹好,并使用纤维交叉的方向来增加强度。
- 将球棒放在模具中加热,使外层材料紧密融合在一起。
冰球球棒的大小与形状各异——在此案例中所加工的是用于击球射门的那一类型。在最顶级的比赛中,选手们使用的是根据自己需要设计的定制球棒。在“击射”动作时(将球棒用力下压直到在冰上压弯,利用其反弹出高达160公里时速的能量来击球),球棒容易被折断。一名普通的球员在一个季度的比赛中会用掉70到120根球棒。
这些对球棒性能的要求,都是球棒生产商所面临的挑战。他们往往需要同时满足高级定制以及面向大众的批量生产这两个市场,而“定制”以及“批量”这两个要求正是机器人应用能够同时满足的。
Sunrob公司利用RoboDK制作冰球球棒
当用户需要从大块材料中切割出所需要的立体形状时,机器人钻磨(即Milling,本文或注为“打磨”或“磨边”)是最合适的加工方式。由于机器人的工作范围更大,不像数控机床(CNC)对加工材料的大小有机械性的限制。另外,用户需要选用合适的软件给机器人的打磨路径编程,这个功能往往不是一般机器人自带软件工具的“标配”,需要额外购买。
Sunrob公司的工程师们需要一个有效、灵活、容易使用又性价比高的编程工具来快速实现将3D设计模型转化为机器人路径。他们选择了RoboDK——它的标配中就含有钻磨向导工具。
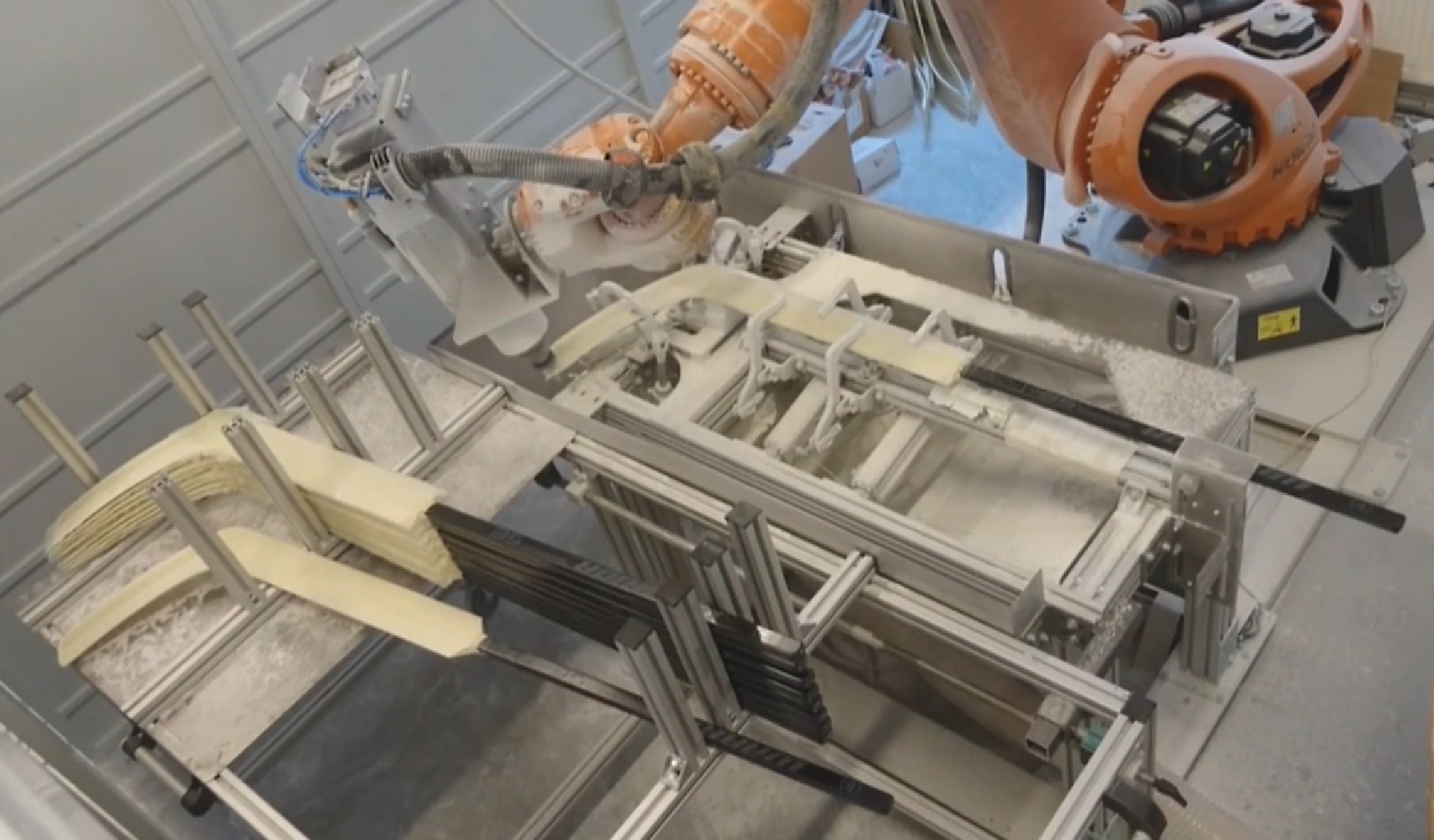
下面的视频展示了他们的实现的机器人磨边加工工序:
(如视频不能正确加载请点击链接至优酷观看)
非常出色!
Sunrob项目的三大特色
该解决方案集成了很多优秀的特点,他们为用户集成了一个无缝自动加工过程、完成了加工要求。有三个我们认为最出色的地方:
- 灵巧的机器人与夹具集成——我们最先看到的是机器人路径与夹具控制器的完美配合,避开了夹具的阻碍。这是很多生产商都面临的问题——如何在固定工件材料的同时避免夹具妨碍加工工具的路径。
- 使用工具转换器——工业机器人的一个很大的优势就是可以在同一台机器人上使用不同的工具。该应用中使用了工具转换器,一端安装了抓取器与激光扫描仪,另一端安装了机器人磨边钻头。
- 几个加工过程的无缝集成——该应用仅使用一台机器人,在几分钟内完成了一个复杂的加工过程。他们利用RoboDK中的功能以及专有的“机器加工”向导,仿真不同的机器人工具路径、及工具转换。
机器人磨边加工冰球球棒的全过程
最后我们完整地介绍下实现该应用的全过程,分为下面5个步骤。
1. 使用激光扫描已有的球棒
就像我们上面介绍的,专门定制的击射球棒有着各不相同的设计。Sunrob团队需要利用一支运动员已有的球棒,用手持扫描仪恢复出它的数字模型,并加工出与它一模一样的球棒。
2. 使用RoboDK生成机器人磨边程序
使用扫描后生成的3D模型,并利用计算机辅助生产(CAM)软件为其生成加工工具路径。RoboDK针对多款CAM软件都设有接口,让用户一键完成工具路径导入。使用RoboDK的机器加工向导,快速生成并调试机器人磨边路径。
3. 在工作台上取放球棒半成品
正像视频中演示的,需要用机器人实现半成品材料在工作台上不同位置的取放,与夹具、垛堆位置的对准。同样地,在RoboDK中设计并快速实现取放功能。
4. 使用激光仪测量球棒半成品
为了保证机器人磨边过程的准确性,在每次打磨之前使用激光测量仪对半成品材料进行准确的扫描。测量的坐标信息用来将机器人路径与材料位置对准。
5. 机器人磨边加工
最后,将夹具控制器与机器人控制器集成,机器人将球棒半成品切割成在RoboDK中设置好的3D形状,夹具的各个夹爪分别自动避开机器人路径,完美配合。
你的企业中使用机器人进行钻磨加工吗?欢迎与我们分享加工过程中遇到的困难与挑战,我们愿意尽可能帮你解决!


非常棒的应用案例!