基于数字孪生与人工智能的从仿真到实际部署
在ARENA2036,我们正融合人工智能、机器人技术与数字孪生技术,推动新一代自主系统的发展。作为欧洲AI MATTERS倡议的一部分,研究团队基于RoboDK开发了一套全新的无人机应用框架,可实现智能空中巡检、库存监控以及物流自动化作业。
本案例研究介绍了一套仿真驱动型开发流程:由人工智能赋能的无人机先在虚拟环境中完成设计、算法训练与性能验证,之后再落地进行真实场景部署。
ARENA2036与AI-MATTERS倡议
ARENA2036(下一代汽车主动研发空间)是欧洲顶尖科研机构,依托其创新平台整合各大研究团队协作资源,助力科研创新与学术卓越发展。园区坐落于制造业重镇斯图加特,始终走在前沿技术与应用研究项目的最前列。
在其多元化的项目布局中,AI MATTERS倡议尤为重要。该倡议与欧盟携手合作,通过人工智能技术融合应用,推动欧洲制造业转型升级。
面向自主无人机系统的数字孪生方法
传统仓库作业高度依赖人工巡检与条码扫描,不仅可扩展性受限,还会造成作业效率低下。为解决这些痛点,ARENA2036研发了一套数字孪生驱动型框架,以RoboDK作为核心仿真环境,实现以下功能:
- 仓库及车间环境建模
- 无人机导航与感知仿真
- 算法部署前的人工智能验证
该开发方式支持快速迭代、降低实体测试风险,并能确保系统从仿真环境迁移至真实场景后,依旧保持稳定可靠的运行表现。
基于RoboDK的数字孪生驱动开发
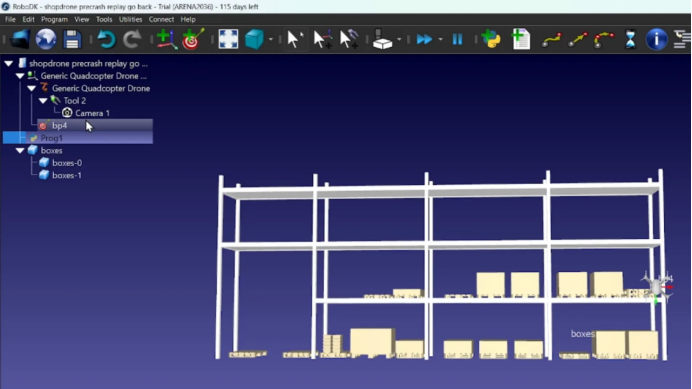
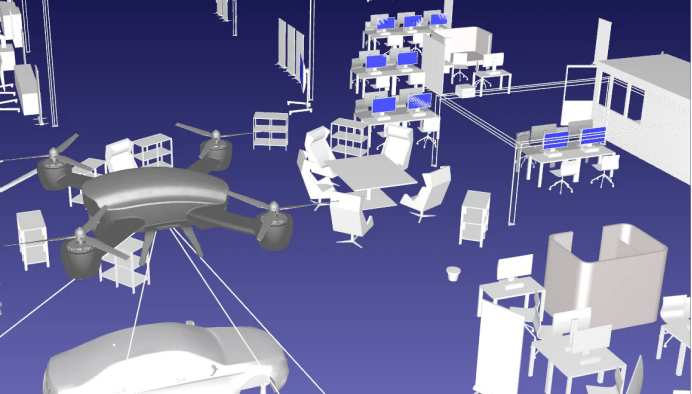
项目首先在RoboDK中搭建ARENA2036车间现场的高保真数字孪生模型。该仿真环境为以下工作奠定基础:
- 空中巡检仿真
- 人工智能训练数据集生成
- 自主导航策略验证
项目进展表明,研究团队借助 RoboDK 完成了车间空中监测仿真,可在无实体安全风险的前提下开展可控实验。

人工智能感知:从仿真数据到实时检测
该项目的一项核心创新,是仿真与人工智能训练之间的闭环流程。
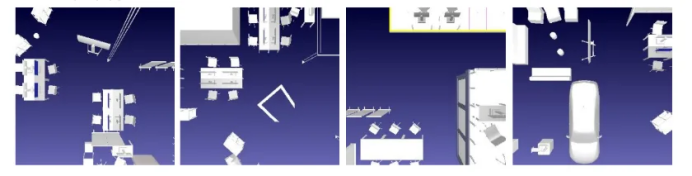
仿真环境下的数据集生成
- 搭载在无人机上的仿真二维相机采集了整个车间的航拍图像。
- 通过在保持飞行高度不变的前提下改变无人机位置,共采集约 150 张图像。
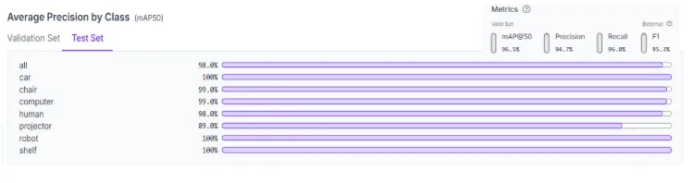
- 该数据集包含椅子、货架、电脑及车辆等多种类目标物体。
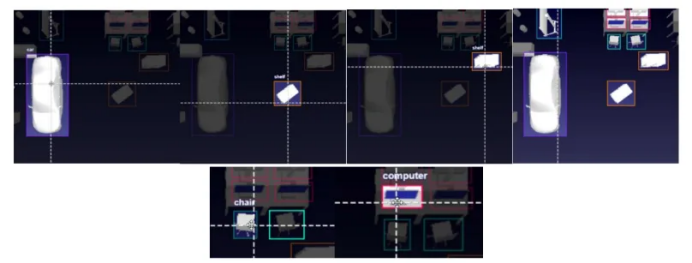
标注与模型训练
- 使用 Roboflow 对多类别目标图像进行标注;
- 通过数据扩充将数据集从144 张扩增至341张;
- 基于YOLO框架训练目标检测模型。
提升仿真真实度
为还原真实现场工况:
- 在仿真环境中加入人体模型
- 数据集扩充,新增第7个目标类别——人员
由此实现:
- 具备安全感知能力的智能感知系统
- 贴近现实的多智能体仿真环境
从而为无人机—机器人混合系统奠定技术基础
跨仿真环境的自主导航
为同时兼顾灵活性与真实度,该系统集成了两个互为补充的仿真环境:
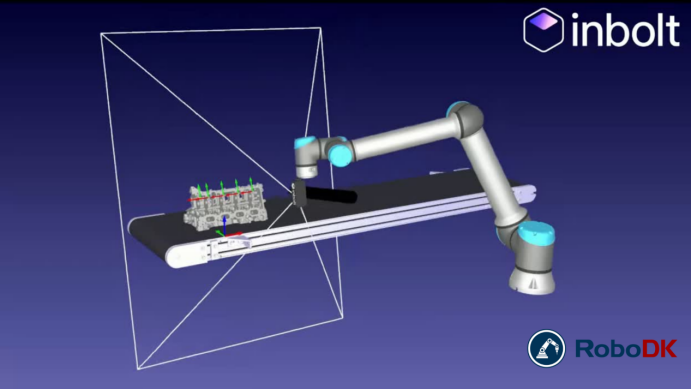
RoboDK:高层级任务仿真
- 定义无人机飞行轨迹与侦察路径
- 实现任务逻辑的快速原型验证
- 支持与感知及人工智能模块集成
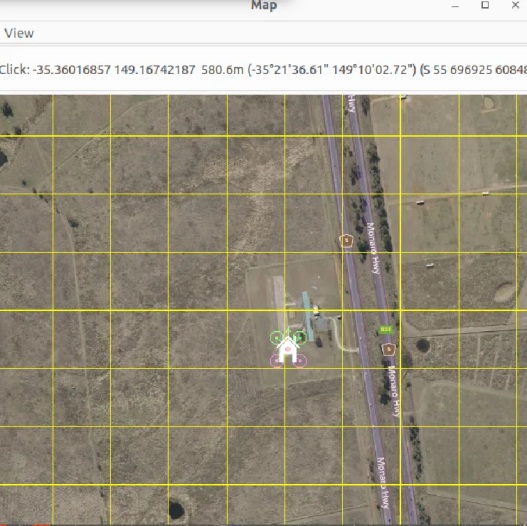
Gazebo+ROS2+ArduPilot:基于物理特性的验证
- 实现逼真的飞行动力学与飞行控制
- 支持软件在环(SITL)测试
- 提供基于地图的导航与遥测数据反馈
这种混合开发模式可实现:
- 在RoboDK中快速迭代开发
- 在Gazebo中完成贴近真实场景的验证
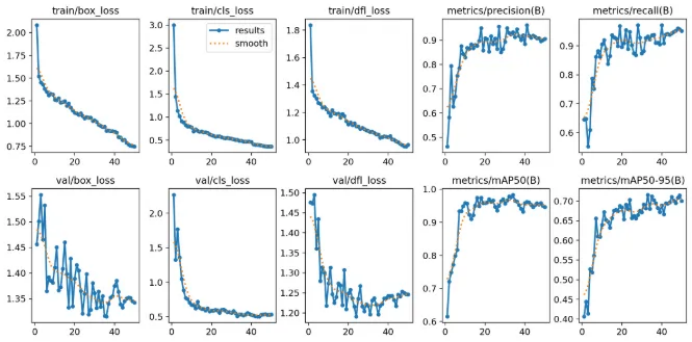
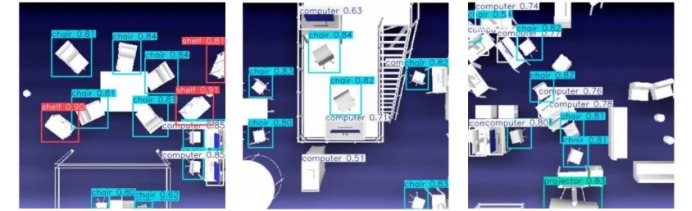
混淆矩阵与各项指标曲线均验证了该模型具备优异的性能。模型训练完成后,随即部署至RoboDK平台的无人机上,开展首次车间巡检仿真测试。
精准自主作业:降落、检测与控制
核心技术成果之一是基于视觉标记的精准降落。
- 无人机以机载相机作为主感知传感器;
- 通过 OpenCV 识别 ArUco 标记;
- 位姿估计流程借助 PnP 算法 解算位置信息;
- 检测到标记后,无人机自动切换至降落模式;
这充分验证了视觉控制可实现全自主飞行作业。


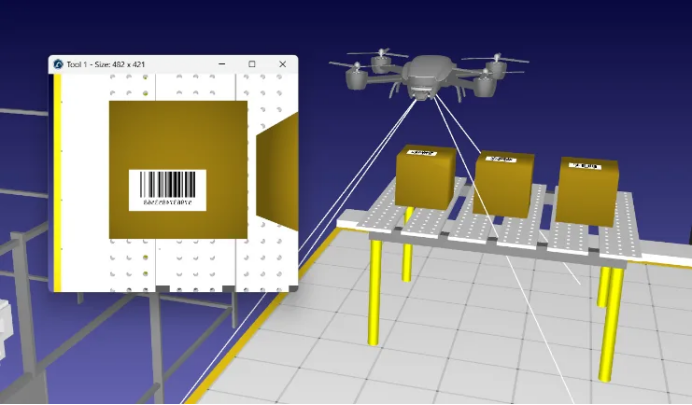
能力拓展:库存管理与物品作业
除巡检监控外,该系统还可拓展应用于物流自动化场景:
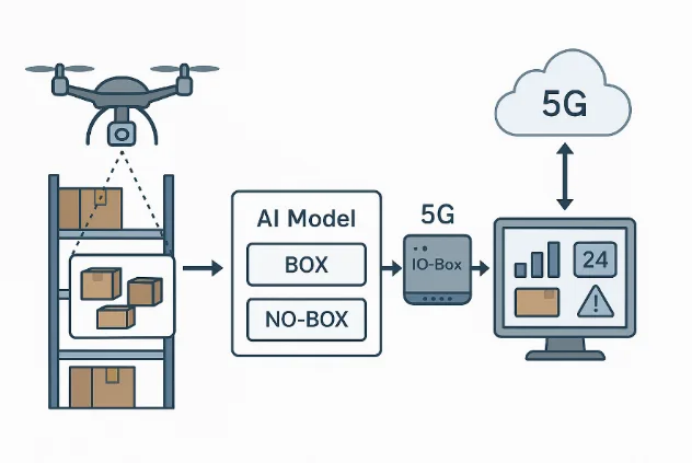
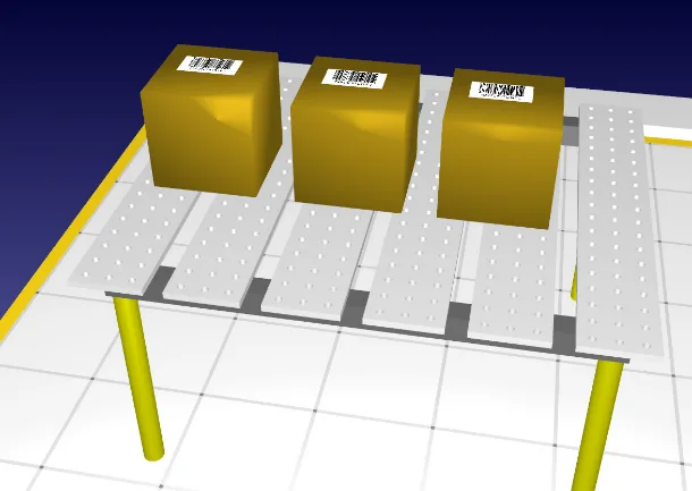
基于条码的物品识别
- 仓库内各类物品均贴有专属条码标签
- 无人机通过机载视觉识别并跟踪各类货物
- 依托目标检索功能实现物流流程自动化
物体转运
- 搭配码垛夹爪可实现拾取-放置作业
- 无人机能够将物品运送至指定投放区域
上述功能使该系统成为一款多功能空中机器人平台。
面向城市级自主物流
本项目还进一步探索了城市场景落地应用:
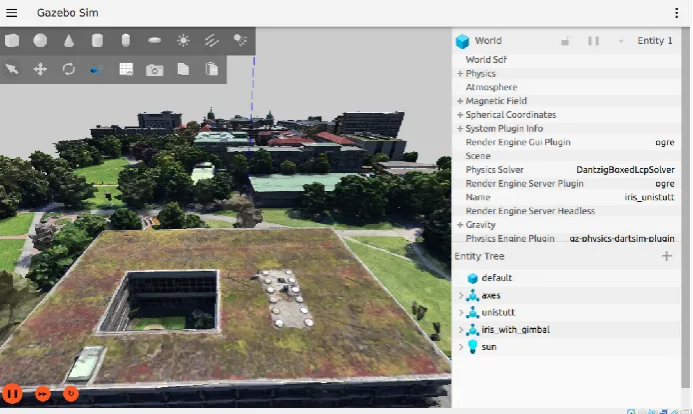
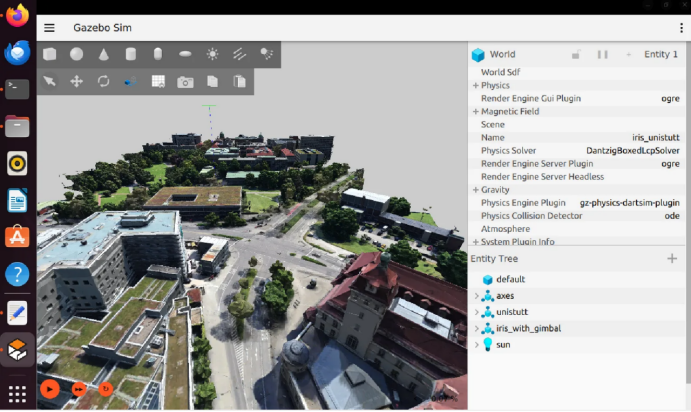
- 利用Blender及地图建模工具,将真实地理场景转换为三维模型;
- 再把仿真环境导入仿真平台开展测试;
- 在高真实度的城市级场景中,对无人机自主起飞、降落及导航能力进行验证;
由此可支撑以下应用场景:
- 末端配送业务
- 交通状况监测
- 与城市公共基础设施融合联动

真实场景三维模型生成
- 该方法借助Blender、Renderdoc以及MapsModelsImporter插件,将谷歌地图中的真实地点转换为高精度三维模型,完整保留地理信息与建筑结构细节。
- 通过Renderdoc执行进程注入,截取谷歌地图画面帧,并利用插件将其保存为谷歌地图捕获文件(.rdc 格式),以便在Blender中进行可视化建模。
挑战与后续研究工作
本研究指出了目前仍存在的若干开放性难题:
- 保障仿真环境中物理建模与碰撞建模的精准性
- 优化数据集均衡性,实现人工智能模型性能稳定
- 实现RoboDK与Gazebo双仿真环境的无缝集成
- 提升无人机与环境交互的仿真真实度
未来展望
该技术发展路线规划包含以下方向:
- 先进路径规划与避障技术
- 多智能体协同(无人机+地面机器人)
- 实时自适应自主作业
- 在智慧城市与工业生态系统中落地部署
结论:可扩展的自主空中机器人系统框架
本研究验证了借助RoboDK可实现仿真优先的智能机器人系统开发模式,有效弥合人工智能模型与实际落地应用之间的差距。
本研究融合集成了以下技术:
- 人工智能驱动感知
- 自主导航
- 数字孪生仿真
- 实景验证
依托ARENA2036研究平台,正为可规模化、高安全性、智能化的空中机器人系统奠定发展基础,有望赋能工业作业及更多应用领域转型升级。