
学习机器人技术应当具备可及性、经济性且易取性,这正是RoboDK秉持的理念。也正因如此,我们在YouTube频道上打造了一系列全面的免费教程,助力你掌握机器人仿真与编程技能。
无论你是初涉机器人领域、探索基础知识的入门者,还是经验丰富、力求精进技艺的行家,这些教程都能让你以最高效的方式达成目标。
以下是RoboDK YouTube频道上最受欢迎的7个机器人教程。
1.Python离线编程
在机器人领域,Python凭借其灵活性和易用性成为最受欢迎的编程语言之一。
这个广受欢迎的教程将向你展示如何利用RoboDK强大的Python应用程序接口(API)来创建、模拟和优化机器人程序。
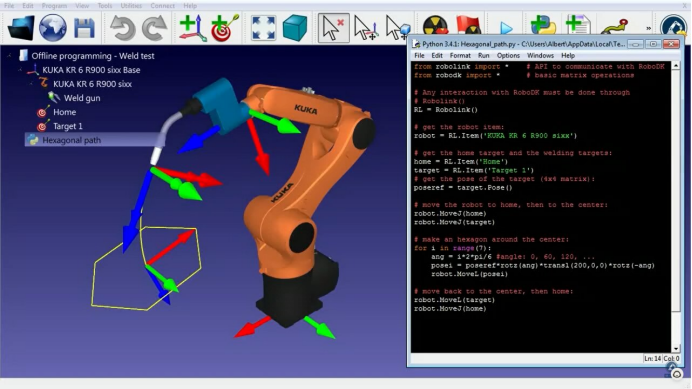
在本教程中,您将学习如何在RoboDK中为模拟的KUKA机器人编写六边形焊接路径。使用自定义Python代码,它展示了如何针对特定目标使用关节移动 (MoveJ) 命令创建焊接路径。
此外,该教程还会引导你生成机器人程序并将其发送至库卡控制器。
2.初学者搭建首个机器人工作站指南
这是我们播放量最高的视频之一,这个面向初学者的教程详细介绍了开始使用RoboDK需要了解的所有内容。
在这个教程中,你将学习如何安装RoboDK并熟悉其界面。你会学到一些能实现更流畅操作的快捷方式,掌握创建简单机器人工作站的步骤,以及管理参考坐标系和目标点的实用技巧。
如果你还没有下载RoboDK,那么这个教程是你应该首先观看的。它通过实际操作步骤,全程引导你从下载软件开始,直至做好创建首个可运行仿真的准备。
3.轻松从零开始打造你的首个机器人项目
这是另一个面向初学者的热门教程,它能帮助你从零开始创建首个机器人项目。学完之后,你将打造出一个简单的机器人应用程序。
在这个教程中,你将学习如何从我们丰富的机器人模型库中找到你所选定的机器人型号,并挑选出完全符合你需求的机器人。此外,你还会学习如何操作参考坐标系,这是任何RoboDK编程工作流程中的关键概念。
如果你想快速了解创建新项目的简单方法,那么这个教程再合适不过了。
4. 创建高效的机器人拾取和放置系
由于拾取和放置是机器人应用的基础类型之一,所以这个拾取和放置网络研讨会如此受欢迎也就不足为奇了。
这不仅仅是一段录制好的视频教程,而是一场现场网络研讨会的完整录像。在录像中,我们会深入剖析在RoboDK中设置拾取和放置应用所需了解的所有知识。
在这场网络研讨会录像里,你将学习如何创建拾取和放置目标点、配置机器人运动方式,以及优化运动轨迹以提高仿真效率。学完之后,你将掌握创建具备实际功能的拾取和放置机器人工作站所需的一切知识。
5. 同步多机器人系统以实现完美的输送工作流
你是否曾想过如何模拟一个完全同步的多机器人系统?
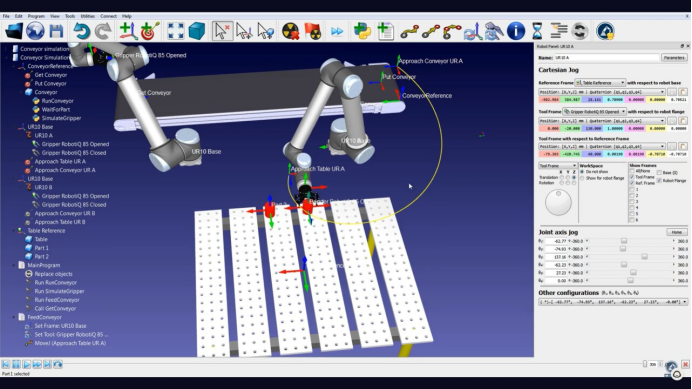
这个广受欢迎的教程展示了如何设置一个由两台协作机器人组成的输送带应用场景。
多机器人系统是为自动化流程增添灵活性的强大之选……但倘若缺乏相应的专业知识,对其进行编程可能会颇具挑战。
在这个教程中,你将学会如何运用Python脚本,在短短20分钟内轻松管理多机器人设置。教程会演示如何检测模拟输送带上物体,将其附着到机器人夹具上,并实现两台机器人之间的同步运动。
6.导入并制定3D模型和工具,实现无缝仿真
RoboDK的一大优势在于其对自定义组件有着广泛的兼容性支持。倘若你手头有三维物体文件,便能够将其导入,并运用到仿真操作当中。
这个广受欢迎的教程是你学习如何将三维模型导入RoboDK以及定制机器人工具的首选资源。该软件支持STEP、IGES、STL等多种文件格式,通过本教程,你将学会如何将这些对象无缝融入你的项目之中。
视频会一步步引导你,从为自定义对象文件添加参考坐标系,到创建定制工具(在本例中是喷枪),教你如何利用自定义对象文件搭建具备实际功能的机器人工作单元。
7. 借助前沿机器人铣削技术革新数控加工操作
随着机器人加工技术的兴起,诸如机器人铣削这类应用正逐渐成为制造业工艺流程中一股强大的新生力量。
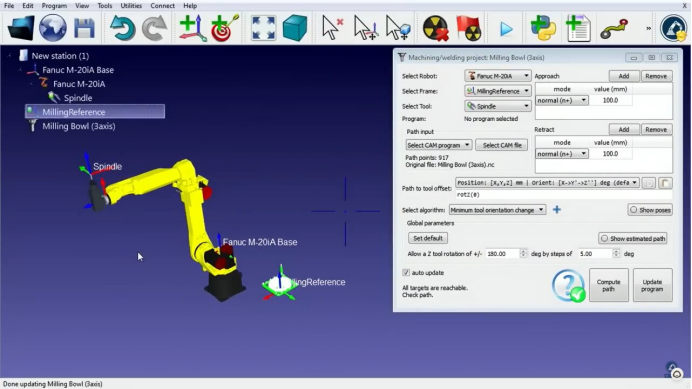
在这个实用性教程中,你将学习如何借助RoboDK,把计算机数控(CNC)程序转化为机器人铣削路径。教程会逐步引导你完成一系列操作,包括导入计算机辅助制造(CAM)文件、完成工作站设置、优化铣削路径以及生成机器人程序。
此外,视频还讲解了三轴和五轴铣削的操作步骤,同时介绍了如何在同一工作站中模拟多台机器人协同作业。
通过我们的教程和培训资源释放您的机器人潜力
RoboDK YouTube频道拥有海量免费资源,能让你全面了解机器人领域的各类知识。
若想及时了解我们发布的所有新视频,务必订阅该YouTube频道!
要是你没有找到特定问题的答案,不妨先到RoboDK文档页面查找。


