编程机器人从未如此简单!借助专为编程设计的RoboDK插件套件,您可以更快、更容易地编程,甚至可以享受编程过程!
坦白说——当下技术环境已对机器人进行复杂的编程简化。但即便如此,通过优化编程流程中的关键节点,您仍可进一步简化工作。
在RoboDK不断扩充的插件库中,我们有一系列的选项来微调特定的编程任务和简化复杂的工作流程。
这里有 15 个非常有用的插件来优化您的机器人编程:
1. 机器人操控器
当你想要实时地完全控制你的机器人时,机器人操控器允许你以渐进的方式移动机器人,其操作逻辑类似于传统的手动操纵方式。
核心功能包括:
- 通过 RoboDK GUI 移动模拟或物理机器人。
- 允许相对于活动参考框架的运动。
- 以毫米或度为单位改变步长。

2. RoboUI
RoboUI可帮助您轻松设计机器人解决方案的自定义用户界面(UI)组件,并将其直接覆盖到RoboDK的三维场景中。
核心功能包括:
• 基于强大的ImGUI库实现无缝集成,简化图形界面设计流程;
• 支持实时检测鼠标在布局中的坐标位置;
• 支持一键切换自定义界面与默认界面模式。
3. 用户界面添加
UI Add提供了更多的特性,可以将用户界面元素合并到项目中,并根据项目的需要对它们进行定制。
核心功能包括:
- 用于UI的其他自定义元素。
- 用灵活的UI窗口替换默认的程序树。
- 不透明的渲染和简单的对接窗口。
4. TCP锁定
当需要使六轴工业机器人的末端执行器保持固定位置时,TCP锁定功能Lock TCP可实现工具中心点的位置锁定。
核心功能包括:
- 外部轴运动时的TCP保持。
- 自动规避不可达姿态。
- API快速切换锁定状态。
5. 游戏控制器
游戏控制器通过添加对标准游戏控制器的支持,增加了通过RoboDK点运动机器人的简单性和灵活性。

核心功能包括:
- 兼容多款游戏控制器。
- 通过RoboDK驾驶员模块实时点动控制物理机器人。
- 将机器人运动映射到游戏手柄按钮和操纵杆。
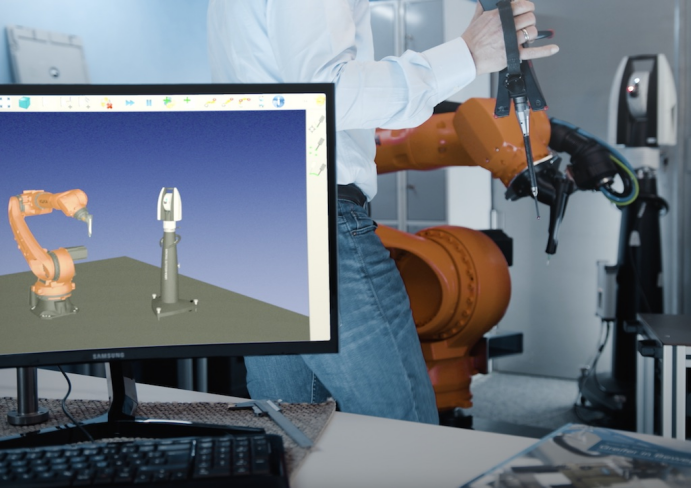
6. Twin Track
想让机器人编程如同手把手教学般简单直观?TwinTrack插件正是您的理想之选。
TwinTrack是我们标杆级的动作示教编程解决方案,您只需手持商用现成的高精度测量探头进行物理轨迹示教,即可将动作数据实时同步至机器人程序。
核心功能亮点:
- 手持探头直观示教。
- 0.15毫米级超高精度。
- 非程序员零代码快速编程。
7. Box Spawner
当您需要将输送机整合到机器人程序中时,Box Spawner可以为您节省大量编程时间。它为简化材料转移模拟提供了一系列功能。
核心功能亮点
- 参数化箱体生成。
- 将箱体物体自动转移到最近的模拟输送机上。
- 盒子位置,方向和尺度的随机化。
8. 应用模板
若您计划为RoboDK开发自定义功能插件,插件开发模板将为您提供完整的开发起点,助您快速扩展RoboDK的工程能力。
核心功能支持:
- 功能模块化示例。
- 在自定义外接程序中使用的图标选择。
- 创建可靠外接程序所需的Python模块和依赖库。
完成插件开发后,您可将其提交至RoboDK插件市场。通过审核后,您的作品将触达全球机器人开发者社区,并可通过付费下载模式获得额外收益来源。
9. 图像处理编辑器
图像处理编辑器提供了一套全面的2D图像处理工具,非常适合在您的应用中集成机器人视觉功能,满足从图像采集到特征识别的全流程需求。
核心功能亮点:
- 支持各种 RoboDK 模拟摄像机、 USB 摄像机、视频文件和图像类型。
- 适用于任何图像处理任务的滤波器范围。
- 用于相机校准、扩增实境和检测高级图像特征的工具
10. DXF导入插件
对于使用DXF文件的CAD用户而言,DXF导入插件是一款不可或缺的工具。它支持将DXF文件中的线条、曲线及其他几何特征直接导入RoboDK,无缝衔接设计与机器人编程流程。
核心功能亮点:
- 将DXF文件中的特征直接导入RoboDK模拟。
- 根据您的产品设计特征无缝创建机器人运动。
- 支持直线、圆弧、圆、折线和样条曲线。
11. 对象删除器
对象删除器通过自动移除仿真环境中的对象,帮助您保持机器人编程项目的整洁与高效,尤其适用于需要动态清理场景的复杂仿真任务。
核心功能亮点:
- 在仿真环境中配置“删除区域”,指定对象清理的逻辑边界。
- 通过Python脚本实现对象删除逻辑的自动化。
- 提供一键删除功能,可瞬时清除定义区域内的所有对象,简化临时清理操作。
12. 对象实用工具
对象实用工具提供了一系列便捷功能,用于在仿真环境中高效管理对象,简化复杂场景的配置与调整。
核心功能亮点:
- 就地替换对象并轻松缩放对象。
- 机器人更换,同时保留机器人基座偏移和目标链接。
- 将物体永久附着在机器人连杆上。
13. 点实用程序
在机器人编程中,点是最基础的编程元素之一。点操作工具提供了一系列高效功能,用于在RoboDK中生成、编辑和管理点对象,显著提升编程效率。
核心功能亮点:
- 在模拟中直接向对象曲面添加点。
- 将点转换为机器人目标,以纳入您的程序。
- 通过插件对点进行简单编辑。
14. 程序实用工具
当需要优化机器人程序结构时,程序实用工具是您的理想选择。它提供了一系列额外的编辑与调试功能,帮助您高效管理程序逻辑与指令。
核心功能亮点:
- 从循环运动 (MoveC命令) 到一系列连接的线性运动 (MoveL命令) 的转换。
- 机器人程序的合并、反转和调试的各种工具。
- 用于修改程序树中对象的可见性和扩展子程序调用的实用程序。
15. IO监视器
IO监视器通过实时监控外部输入输出(I/O)状态,帮助您全面掌握程序与外部设备的交互情况,确保编程流程的稳定与高效。
核心功能亮点:
- 从 RoboDK 中实时监视输入和输出状态。
- 支持所有IO格式,包括布尔值、浮点数和字符。
- 一个可停靠的UI,用于平滑、有组织的编程工作流。
合适的编程工具能够彻底改变机器人编程的方式,帮助您显著提升编程效率与创造力。
通过这15款RoboDK插件,您将获得简化编程流程、优化工作流所需的一切工具,从而以更快的速度实现卓越成果。

