拾取与放置”是机器人技术中最基础的应用之一。借助合适的系统,你可以将拾取与放置机器人应用于企业中的各类任务……但如何选择合适的机器人呢?
无论您从事制造业、物流业、电子商务还是其他领域,几乎都可以通过机器人抓取与放置技术来优化的任务。这项看似简单的操作能够缩短生产周期、提升产能并提高作业一致性。
但选择合适的拾取与放置机器人并非总是一蹴而就。几乎任何机器人型号都能胜任这项基础任务,这使得选型过程颇具挑战性。
本指南将带您全面了解如何根据自身需求选择最合适的拾取与放置解决方案。
什么是拾取放置机器人?
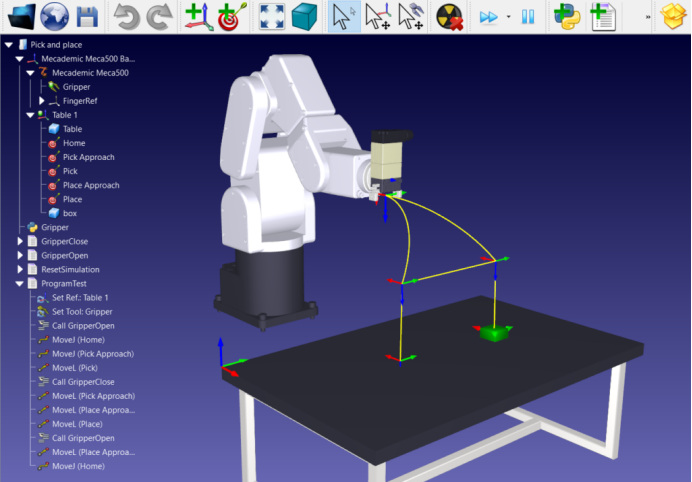
抓取与放置机器人是指能够从某一位置抓取物体并将其移动至另一位置的机器人。最基础的配置是配备夹爪作为末端执行器的机械臂。
鉴于该任务的简单性,专门为抓取与放置任务设计的机器人型号较为少见。更常见的情况是,抓取与放置只是机器人能够执行的众多应用之一。
选择适合您抓取与放置应用的机器人类型,需考虑被搬运物体的特性及作业环境等因素。
拾取与放置机器人的类型
大多数工业机器人均可用于拾取与放置任务。然而,某些类型的机器人应用最为广泛。

以下是一张关于用于拾取与放置的主要机器人类型及其最适用任务的表格:
| 机器人类型 | 描述 | 适用场景 | 主要优势 |
| Articulated | 多关节机械臂 | 适用于多样化任务及重载作业 | 灵活运动范围,精准动作控制 |
| SCARA型 | 水平运动机械臂 | 适合高速水平作业 | 速度快、结构紧凑、定位精准 |
| Delta型 | 三角运动结构 | 适用于轻量高速作业 | 极速响应,承载能力较低 |
| Cartesian | 线性X-Y-Z运动 | 适合大型部件搬运 | 直线运动精度高,可扩展性强 |
是否有不适合执行拾取与放置任务的机器人?
在大多数情况下,当我们谈论拾取与放置机器人时,通常指的是上述提到的各类机械臂。虽然其他类型的机器人也可以用于拾取与放置任务,但更常见的做法是使用不同的术语来描述。例如,自动导引车(AGV)或无人飞行器(UAV)可以将物体从一个地方移动到另一个地方,但由于移动距离较大,这种情况下更适合用“物料搬运”来描述其功能。
选择挑选和放置机器人之前要考虑的关键因素
在评估适用于拾取与放置任务的机器人型号时,建议重点考量以下因素:
• 速度与产能—您的任务需要达到怎样的循环时间?每分钟或每秒需搬运多少个物件?
• 负载能力—机器人需搬运物件的最大重量与尺寸是多少?
• 精度要求—该任务在拾取与放置环节分别需要达到何种精度水平?是否需要通过机器人校准来提升精度?
• 工作空间—您的厂房为机器人预留了多大的可用空间?
• 编程便捷性—您的团队已具备多少机器人编程专业知识?机器人编程软件还需与哪些其他工具进行集成?
这些问题能帮助您缩小适用于拾取与放置任务的机器人选型范围,让决策过程更加准确。
确定上述需求后,您可通过我们丰富的机器人库中的筛选功能进一步精简选项。

为何仿真在拾取与放置项目中至关重要
在选择拾取与放置解决方案时,最容易被忽视的环节之一就是编程。虽然相较于更复杂的机器人应用,这项任务的编程难度较低,但通过选用合适的机器人编程软件,您还能进一步简化流程。
仿真功能让您能在将拾取与放置任务部署到实体机器人前,先在虚拟环境中进行测试。这不仅能避免编程错误,优化运动轨迹,还能消除碰撞风险。
像RoboDK这样的编程工具还能为更高级的拾取与放置任务(如多机器人协同作业或传感器集成)提供支持功能。
如需深入了解,请参阅我们的指南《如何使用RoboDK编程拾取与放置机器人》。
关于取放机器人的常见问题解答
您对取放机器人有疑问吗?
在我们的机器人论坛中提问是个不错的选择,我们的活跃社区成员或RoboDK团队可以为您提供专业指导。
以下是关于取放机器人的几个常见问题:
哪种取放机器人最好?
没有绝对“最好”的取放机器人。事实上,对于这种相对简单的任务,可能有数十种机器人型号适合您的需求。因此,最明智的做法是先确定符合上述关键因素的机型,然后选择一款“足够好”的机器人。
我的行业适合使用取放机器人吗?
无论您属于哪个行业,取放机器人的应用范围都非常广泛,答案几乎肯定是“适合”。即使在医疗设备制造等高度监管的行业,也有大量任务可以由取放机器人完成。
我需要掌握机器人编程知识吗?
不需要!借助RoboDK,即使毫无机器人编程经验,您也能轻松部署取放任务。
我们还提供了RoboDK教程,逐步指导您从零开始完成取放任务的部署。
从机器人库开始更智能的选型
如果您希望大幅加快部署速度,RoboDK机器人库是一个理想的起点。
您可以通过该库筛选适合的机器人型号,并立即在仿真环境中进行测试。借助RoboDK,您可以快速、轻松地让取放机器人投入运行。