拾取和放置编程是机器人技术中的一项基本技能。但是,如何为你的工业机器人快速、轻松地创建此类程序呢?
通过RoboDK简便的编程界面,你在几分钟内就可以创建一个拾取和放置程序。
下面将讲述如何开始简单的拾取和放置编程。
使用工业机器人进行拾取和放置的好处
这可能算是最简单的一项机器人任务了!
即使你的计划更加复杂,在你进行更复杂的设置之前,学习如何编程这个基本任务也是有必要的。
使用工业机器人来解决此类任务是再合适不过的。机器人比人工更稳定,工人的工作效率往往会随着高重复性的任务以及长时间的轮班而下降。
许多工业任务都属于拾取和放置的范畴,包括堆放、分拣、包装和机器维护。

为何要用RoboDK编程拾取和放置
其实可以用很多种方法编程一个工业机器人来完成这项任务。
这些方法包括使用机器人的示教器、手动引导或使用制造商的专有语言进行编程。
使用RoboDK的好处是编程接口非常容易使用。RoboDK与数百款工业机器人兼容,你可以在几分钟内对这个动作进行编程。
其他方法编程工业机器人都不具备这种灵活性。
如何使用RoboDK编程拾取和放置
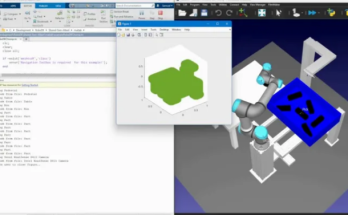
使用RoboDK编程这个任务非常简单。本篇将介绍一些关于RoboDK模拟环境的基本概念。
以下是在 RoboDK 中首次编程机器人拾取和放置任务的9个步骤:
1 创建机器人程序
首先,需要创建你的机器人程序。包括从我们的机器人库中下载机器人模型,添加其它模型(例如,用于拾取的桌子、传送带),以及添加夹持器或其他末端执行器。
2 学习机器人抓取和分离物体
在RoboDK中,拾取和放置动作都是以两个“模拟事件”为中心,即“附加对象”和“分离对象”,你需要熟悉这两件事。
当你想让机器人拿起一个物体时,你只需要将它的末端执行器移动到物体附近,然后选择“附加物体”将末端执行器附加到最接近它的物体上。而选择“分离对象”,机器人就会释放任何附加的对象。
3 创建拾取目标
要开始创建程序,请先创建一个目标,机器人将在其中拾取选定的对象。在RoboDK模拟中,通过右键单击对象并选择“Get with robot”,可以快速将机器人移动至任何对象。
4 设置进近偏移
在编程任何机器人运动时,添加进近偏移几乎总是一个好主意。
这样可以避免机器人在穿越开放空间时与物体发生碰撞。你可以编程机器人快速移动到接近距离(使用不受控制的关节移动),然后缓慢移动(使用受控制的线性运动)以抓住对象。
5 编写附加子程序
用两个独立的子程序(拾取动作和放置动作)编程拾取和放置任务通常是一个好方法。这使你可以轻松地复制机器人的动作,并使你的机器人程序更加易于管理。
使用以下步骤创建附加子程序:
通过关节移动,将机器人移动到接近偏移处。
使用线性移动转到抓取位置。
通过“附着对象模拟”事件捕捉对象。
通过线性移动将机器人后退到接近偏移处。
6 创建放置地点目标
现在,你将拥有所需的拾取和放置运动的所有基本构件。在此,通常最有效的方法是只复制和粘贴程序的一部分部分,然后对它们进行调整。
例如,通过复制拾取位置并将其移动到工作区的另一部分,可以快速创建放置位置。同样也应该复制进近偏移。
7 编程分离子程序
放置动作与拾取动作基本相同。但是,您可以选择“分离对象模拟”事件,而不是使用“附着对象”。你可以复制你的拾取子程序,然后对其进行调整。
8 融入你的主程序
最后,你要创建你的主程序。这一步,你将首先选择你的拾取子程序,接下来是你的放置子程序。当你运行主程序时,机器人应该从一个位置拾取对象,并将其放置在另一个位置。

9 额外的技巧:替换模拟对象
运行程序后,你可能会发现对象现在位于错误的位置,无法重新启动模拟。可以通过选择模拟事件,设置对象位置并保存对象的起始位置,以达到快速重置程序。
具体拾取与放置编程视频可观看我们的免费课程
如果看不到实际操作,很难按照上文进行操作,对吧?
你可以在我们的免费视频课程中看到所有这些培训以及更多内容。它包括简单的拾取和放置应用程序的培训,以及更复杂的示例,例如形状不同的对象。