RoboDK TwinBox为推进自动化工程师在生产机器人编程方面提供了最新的方案。该紧凑型系统于2023年11月推出,将预装的RoboDK软件集成到工业PC和小型单片机或IPC中。RoboDK TwinBox可以在生产环境中同时管理来自不同制造商的多个设备和机器人。
专注于机器人仿真离线编程软件的RoboDK意识到目前需要一种不依赖于传统计算机的更紧凑、更通用的解决方案。根据客户对此类产品的需求,我们创建了TwinBox。该款独立的系统提供了一整套功能,使用户能够使用简单的单片机或IPC在其工作空间中轻松设置和管理机器人系统。
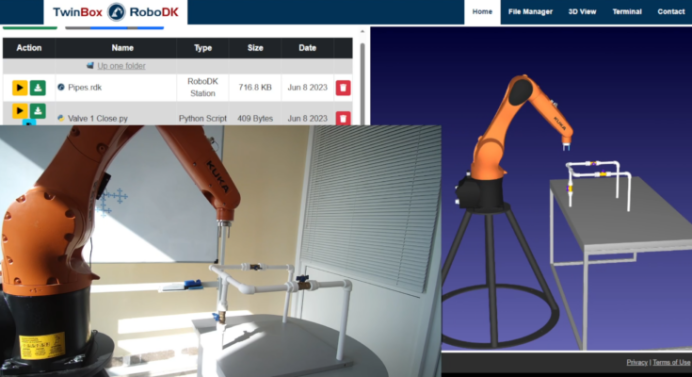
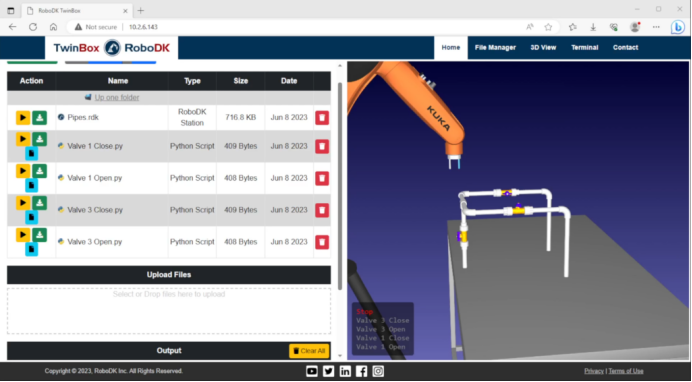
TwinBox可以通过网页浏览器轻松控制,允许用户远程触发操作并获取单元的3D视图。
RoboDK的软件开发人员Dmitry Lavygin说到:
RoboDK已经能够使用其在线模式和机器人驱动程序直接在真实机器人上运行。但是,在生产环境中台式机或笔记本电脑并不常见。
TwinBox的目标是为工业计算机提供专用版本的RoboDK,并在嵌入式设备上实现远程控制,无需传统显示器,键盘或鼠标。用户可以从任何地方使用浏览器或其他远程RoboDK连接方案远程控制系统。
为生产机器人最大限度地节省空间的需求
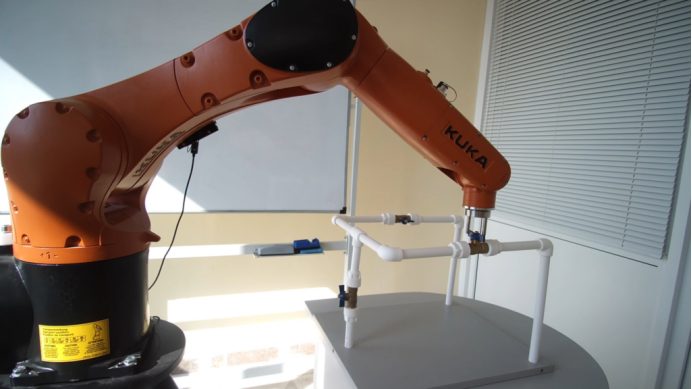
对于希望将RoboDK直接投入到生产线中的生产工程师来说,没有节省空间的解决方案,RoboDK的团队在发现这种方案在市场上处于空白后构思了TwinBox。TwinBox结构紧凑,易于定位,可以安装在工厂机器人控制系统的旁边或内部。

TwinBox其中的一个关键功能是它能够在不需要鼠标、键盘和显示器的情况下有效运行。它只需要网络接口即可无缝连接到内部网络和机器人控制系统。
这使用户可以节省更多宝贵的占地面积,同时仍然能够利用RoboDK提供的全套功能。
TwinBox 是面向机器人编程和自动化工程师的一体化解决方案,具有许多优点,包括紧凑的尺寸、低成本、易于设置和多功能性。
基于可靠技术的远程机器人编程
RoboDK的产品开发原则是在可能的情况下,在成熟的技术基础上构建新的解决方案。这意味着可以在不影响可靠性或稳定性的情况下提供高质量的远程机器人编程解决方案。
RoboDK打造了一个TwinBox这样可靠的系统,以实现在工业级和消费级硬件上运行。它支持多种操作系统和硬件架构,包括在 Intel x86-64平台或ARM上运行的Windows和Linux Debian或Ubuntu。RoboDK同样也为基于Nvidia Jetson或Raspberry Pi的工业计算机等系统提供专用版本。
RoboDK的软件开发主管Samuel Bertrand说到:
该软件的工作方式与RoboDK的桌面版本一样。主要区别在于可以从任何浏览器远程控制系统。
通过其远程界面,用户还可以从世界任何地方访问他们的 TwinBox,完全控制所有连接的外部机器人、设备和传感器。这使用户能够远程实时监控他们的机器人,使他们比以往任何时候都更灵活地控制他们的自动化程序。
将多个设备系统简化为一个集成系统
所有工业机器人面临的一个共同挑战是,每个编程解决方案通常仅限于单个制造商。这意味着每个机器人品牌都需要单独编程,这会降低部署速度。
通过TwinBox,用户可以将来自不同制造商的多个机器人连接成一个集成系统。这增加了灵活性,并大大加快了集成过程。
RoboDK支持来自900多个品牌的50多种机器人模型。这种广泛的兼容性意味着用户可以确保他们的TwinBox几乎可以与他们需要的任何机器人模型一起使用。该系统还设计用于快捷地处理来自各种设备的同时连接。不仅仅包括机器人,还包括外部传感器和计算机视觉相机等其他设备。
TwinBox支持同步连接,允许使用浏览器从远程进行控制。TwinBox还支持OPC-UA,并且RoboDK将陆续支持其他工业协议。
今后计划
RoboDK计划将TwinBox整合到更大的RoboDK生态系统中。这包括现有的解决方案,如主要的RoboDK桌面应用程序,以及基于Web的开发工具,如RoboDK for Web。
这种集成将使用户能够充分利用RoboDK的所有功能。
TwinBox的潜在应用几乎是无穷无尽的。RoboDK希望用户能够充分利用该产品,轻松构建高效的机器人解决方案,将解决方案轻松部署在生产环境中。



One Comment on “TwinBox:RoboDK用于工业机器人集成的紧凑型系统”