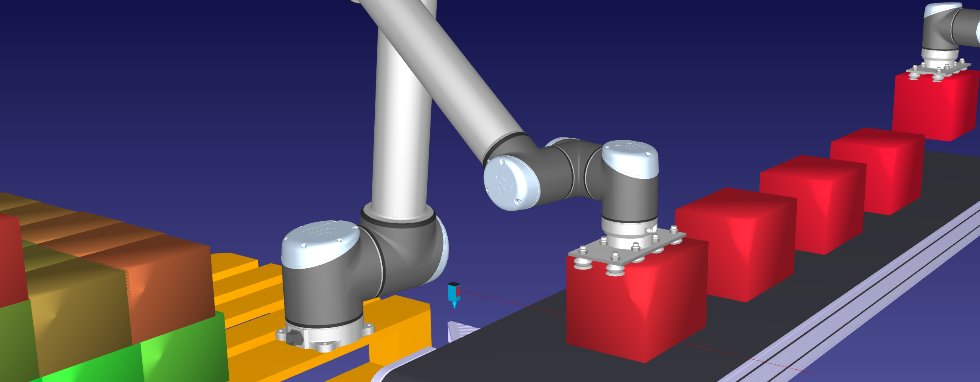
Learn how to build a simulation with 2 Universal Robots and a conveyor belt from scratch in 20 minutes:
Conveyor Simulation with RoboDK
Learn how to build a simulation with 2 Universal Robots and a conveyor belt from scratch in 20 minutes:
Comments are closed.


Hi ,
I am new to Robot simulation.
I am trying to add station to the RoboDK and then mount two Abb Robot on it,.
I have saved the station (3D model as Obj). But I am not sure to mount the Robot on the station.
As some How I am not able to mount / merge the two co-ordinate systems origin.
Do you have video/literature, where it explains, How build up a station ?
Please provide you feed back/ the way to do it?
regards
Aj
You can move robots by holding the ALT key and moving the reference frame. You can also double click the reference frame and enter the coordinates.
The following video will give you an overview of the basic offline programming features:
https://www.youtube.com/watch?list=PLjiA6TvRACQc5E_3c5f3TFXEa56XNR1-m&v=XQs8-QnLy6c
In RoboDK, there is the option to use linear constraints on a joint move. (meaning that max velocity and acceleration of the TCP are constrained). Does it make any sense? Is this option applicable in a real situation and why? (I am referring specifically to a UR10 robot)
Thank you in advance.
Hi Giannis,
Yes, it is possible. You should use a “set speed” instruction. More information here:
https://robodk.com/doc/en/Robot-Programs.html#InsSpeed
RoboDK uses a constant acceleration until the desired speed is reached. This is the same behavior that UR robots use and the cycle time predicted by RoboDK should match the robot speed (assuming you don’t exceed the maximum speed or you don’t use any rounding/blending).
Albert