Do you know how those cool slow-motion food video adverts are made?
You might not know it but robots are often used for high-speed video production. The problem? The technology can sometimes be restrictively expensive for filmmakers.
Here’s how one team of RoboDK users creates amazing slow-motion adverts for huge international brands.
Imagine the scene…
You are watching an advert for a food company. In the video, a chef throws a fresh pizza base in the air. The video slows and the shot zooms in on the spinning dough. As flecks of white flour fall, everything is in perfect focus and perfectly lit.
The video cuts to later in the process. A hand sprinkles shredded cheese onto the pizza base. You can see each piece of cheese clearly as it falls slowly from their fingers.
You now really want to eat a pizza!
The slow-motion dynamic images excite our senses and show the food in its best possible light. But, you might never have wondered how such adverts are made.
It turns out that a lot of these adverts are made with robots…
How Are Mouth-Watering Slow-Motion Adverts Made?
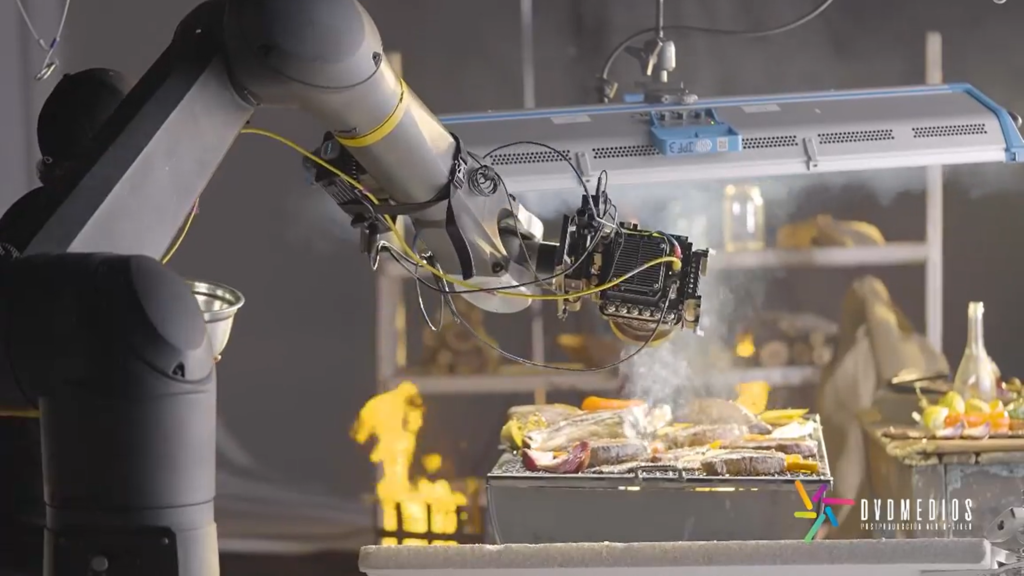
For the last 5 years or so, it’s become common for food and beverage adverts of this type to be made with the help of robots. A high-speed camera is mounted onto the robot’s arm as an end effector while the lighting and other aspects of the scene are synchronized precisely with an electronic controller.
Without robots, the conventional way to create such shots is to move the camera by hand. However, this is a very imprecise method to create such shots. The camera operator doesn’t have enough precision or speed to move the camera in the required motion.
There are some commercial systems for high-speed robotic videography on the market. However, they tend to be expensive and are not accessible to many filmmakers.
One RoboDK user wanted to change that by creating their own robotic system.
Introducing… EngamaDos
EngamaDos is a creative advertising agency based in Santiago, Chile. Known as “La Casa de Color” (the house of color) they provide a range of filmmaking services including color grading, media management, and creative consulting.
One of their core services is high-speed video capture, which is often used for video advertising in the food and beverage industry. EngamaDos works with companies both large and small, internationally and nationally. Some of their clients include Nestlé, Coca Cola, Nacional Beers, and Melt Pizzas.
Xavier Sanchez explains how they first started using robotics for these slow-motion shots after visiting NAB Show, a convention for content professionals from the media, entertainment, and technology world.
He says:
“We first saw a similar system in NAB 2016. But, the price point was very high. For me to be able to deploy such a system in a low GDP country like Chile, it needed to be affordable enough for people to rent it. I wondered if I could create a similar system myself instead of purchasing an existing one.
“There is a lot of demand for these types of shots. I shoot with the robot around 4 times a month. We use them for food, beer, and beverage companies.”
How The Team’s Robotic Filmmaking System Works
Xavier was highly experienced with creating slow-motion video shots. He knew that such a system would require several electromechanical components working in complete synchronization.
This type of shot involves a complex series of coordinated events, which are not easy to achieve.
The actor (e.g. a chef) performs a fast movement such as cutting an onion in two, spinning a pizza base in the air, or sharpening a knife on a steel. These are motions that are often too fast for even the human eye to distinguish clearly.
At exactly the same time, the robot needs to move the camera extremely quickly to create the dynamic shot around the food. A high-speed camera is used to capture the moment at hundreds of frames a second, with exposures of less than 1/1000 of a second.
Often, other components such as lighting and external motors are also moving.
Everything happens within a second.
The EngamaDos Robotic Setup
The team’s system is based around a standard industrial robot. It incorporates many of the components that you would expect in a normal industrial robot cell, including the robot controller and programming system.
The key requirements of a robot for high-speed filmmaking are quite different from most industrial applications. The system doesn’t generally require a huge workspace. Instead, the core requirement is that the camera can move very quickly and precisely.
The Hardware
The core hardware components of EngamaDos’s system are:
- A Stäubli TX90L industrial robot and controller.
- A Raspberry Pi embedded development board.
- A high-speed video camera attached to the robot as an end effector.
- Lighting rigs to light the set.
- Triggers to set off the motion of the robot during each take.
- External motors to move objects during the shots.
The Software
The core software components of the system are:
- RoboDK robot programming software to control the robot and interface with the other components.
- Python running on the Raspberry Pi.
Xavier explains how all these components fit together:
“With the Raspberry Pi, we controlled the triggers, lights, and external motors. This prevents damage to the system or the environment and synchronizes all the FX.
“RoboDK is easy and intuitive to use with nice support. It is a really friendly development environment.”
What’s Next for Engamados and Robotic Filmmaking
Now that the team has created their first version of the system — and used it with many clients — they are looking for new ways to upgrade it.
They plan to increase the speed of the system, allowing for even more impressive slow-motion shots.
Xavier says:
“In about a year, we hope to get a 7th axis and add it to the system to move the robot faster. This is hard to achieve as the robot is 200 kg and we need it to move 6 meters per second with complete precision.”
What could you achieve with a high-speed robot? Tell us in the comments below or join the discussion on LinkedIn, Twitter, Facebook, Instagram, or in the RoboDK Forum.. Also, check out our extensive video collection and subscribe to the RoboDK Youtube Channel



