协作机器人编程并不仅指手动示教。下面我们来讲解协作机器人的各类编程方式,以及如何选择适配的方案。
协作机器人从问世逐步流行至今已有约二十年,手动示教一直是其标志性的简易编程方式。操作人员直接拖拽机械臂至工作区域内的目标点位,机器人便可在运行时复现整套动作。
这种基础编程方式虽能实现快速部署,但协作机器人还有更多编程方案可供选择。针对不同应用场景,选用更进阶的编程方式,能充分发挥更多功能优势。
以下为协作机器人编程的详细指南。
什么是协作机器人编程?
协作机器人编程,是为人机协同作业的机器人编写运动指令与作业流程。相较于传统工业机器人,协作机器人的程序必须兼顾人机共用作业场景下的各项安全规范。

1. 协作机械臂编程
搭载专用协作机械臂后,机器人可在人机共用区域内运行,无需额外设置安全围栏。而多数已投入使用的协作机器人,其实并未实现真正意义上的人机交互协作。
这类场景下的编程方式与传统工业机器人基本一致:只需选用合适的方法完成程序编写即可,安全防护由机械臂本身的设计来保障(但仍必须开展风险评估)。
2. 纯协作型应用
在更进阶的应用场景中,纯协作作业指人机协同完成同一项任务。这类场景会面临工况动态变化、需要实时决策等复杂问题。
相关研究表明,高效的人机协作依赖两套相辅相成的编程层级:
- 直观交互层——支持操作人员在设备运行过程中,即时创建、修改机器人作业任务。
- 自适应行为层——让机器人可针对人为操作(主动操作或意外触碰)做出动态响应。
在选择编程方式前,首先要明确实际需求。若要实现完整的人机协作,就必须采用更高级的编程方案。
工业协作机器人编程方法一览
协作机器人编程没有绝对的最优解,只有最适合特定工况的方案。
以下是主流的编程方式及其核心优势:
| 方式 | 易用性 | 灵活性 | 最佳适用场景 |
| 手动引导 | 极高 | 低 | 低精度、快速部署任务 |
| 示教器编程 | 中等 | 低 | 简单任务 |
| 图形化编程 | 高 | 中等 | 较复杂任务 |
| 脚本编程 | 中等 | 高 | 自定义逻辑 |
| API 编程 | 低 | 极高 | 复杂及深度协作 |
| 离线仿真 | 高 | 极高 | 可扩展自动化 |
你也可以将这些方式搭配使用。比如,RoboDK就同时支持图形编程、离线模拟和API编程。
面向制造商的可扩展协作机器人编程方案
如何甄选协作机器人编程平台?
一个实用的准则是关注两大核心特性:
- 敏捷性/灵活性——您的编程方法必须能适应不断变化的需求。理想的平台应不受品牌限制,允许您在同一环境下为不同类型的机器人编程。
- 可扩展性——这是关键所在。当生产规模从单台机器人扩大时,简单的编程方法往往会失效。请选择能伴随您自动化能力同步成长的编程解决方案。
借助RoboDK这类机器人软件,同一个编程工具便能支撑您从首个应用项目,一路迈向全自动化的协作机器人生产线。
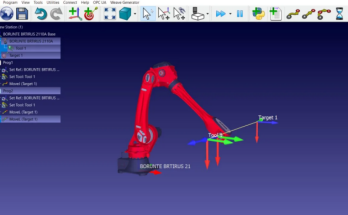
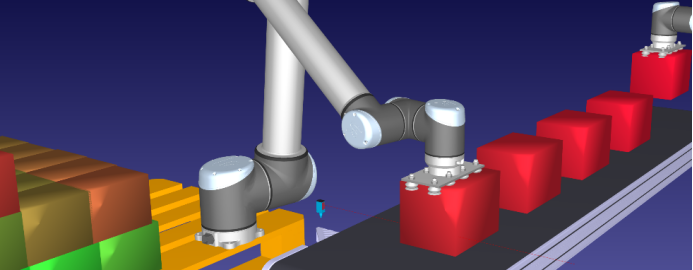
协作机器人离线编程的五大优势
离线编程与仿真,让您能在受控的虚拟环境中创建并测试机器人应用,随后再部署至实体机器人。这与手动导引和示教器编程(协作机器人最常用的两种方式,且必须依赖实体机器人)截然不同。
协作机器人离线编程的优势包括:
- 减少停机时间——大部分编程工作无需占用实体机器人,意味着您无需为了更新程序而暂停生产。
- 加速迭代——在仿真中测试多种场景,助您做出更优决策,更快地部署更多机器人应用。
- 全局优化——仿真器助您优化整个生产流程,而非仅局限于单个机器人应用。
- 高级功能——通过开放高级API与自动化功能,支持更复杂的应用场景集成。
- 轻松复制产线——离线编程让整个机器人工作站能像“复制粘贴”般快速复现,极大提升可扩展性,实现自动化能力的无缝扩张。
这些优势揭示了一个至关重要却常被忽视的考量因素——规划自动化应用的长期增长。
即使您目前只打算引入一台协作机器人,经验表明,企业通常会随着时间推移逐步增加机器人数量。从一开始就选择正确的编程方法,正是为您未来的成功铺路。

如何选择合适的协作机器人编程软件
选择恰当的协作机器人编程方式,很大程度上取决于您的实际需求。这需要综合考量您的编程熟练度、机器人操作经验以及未来的业务增长预期。
您可以遵循以下简单的三步策略:
- 明确团队编程经验——如果团队成员中已有资深的机器人操作专家,建议由其主导协作机器人的部署项目。
- 尝试在仿真环境中构建程序——您可以在采购机器人之前,通过申请RoboDK的免费试用版进行模拟测试。这将助您抢占先机,实现“零成本”起步。
- 从小处着手,逐步迭代——不要试图一步到位。建议先从简单的应用场景切入,随后逐渐增加自动化功能的复杂度。将每一次机器人部署视为在前一阶段基础上的积累与延伸。
选对编程方法,您的协作机器人项目将伴随业务的扩张而持续壮大。