
我们始终努力确保我们的RoboDK中涵盖了最新的机器人技术和功能。
我们定期会通过文章的形式向用户介绍RoboDK最新版本的最新功能。
那我们最近添加了什么其他功能? 有很多!
以下是我们为 RoboDK 添加的10个新颖的神奇功能:
1.使用RoboDK TwinTool轻松进行TCP校准
2022年早些时候,我们推出了TwinTool产品。用户可通过TwinTool使用自动校准程序和现成的传感器直观地校准机器人工具。
你可以在我们的产品页面上了解有关TwinTool的更多信息。

2.新的KUKA Bridge驱动,用于更好的KUKA集成
今年可能最令KUKA用户激动的更新之一是我们引入了KUKA Bridge机器人驱动程序。这改善了KUKA机器人的编程体验。
这个新驱动程序带来的改进包括更快的响应时间、自动机器人搜索和配置、直接文件交换以及更好的错误处理。
KUKA Bridge是基于RoboDK开发团队最新成员Dmitry Lavygin开发的C3 Bridge驱动程序。
3. 使用改进的SCARA逆运动学反转任意轴
我们对SCARA机器人的逆运动学进行了改进。用户可以通过该功能对这种类型机器人的任意一个轴实现轻松地反转。
SCARA机器人实用于各种应用,如拣货和放置、组装和分拣。对于这样的应用,能够在最适合任务的方向上轻松定义轴是非常有必要的。例如,当将SCARA机器人倒置安装时,可以翻转最终轴。
4.升级macOS和Linux支持以及Matlab API
我们最近还改进了RoboDK对macOS和Linux的支持。RoboDK的理念之一是,我们的软件应该在尽可能多种类的硬件平台上运行。通过这些新的更新,我们已经确保我们的macOS和Linux用户可以获得与其他用户相同的高质量体验。
由于Matlab的合作,RoboDK已经能够改进RoboDK的软件和Matlab API之间的桥梁。这允许你更好地使用这款强大的软件为机器人编程。
5.后处理器更新——提高应用程序性能
后处理器是RoboDK机器人编程工作流程的重要组成部分。它们是RoboDK和物理机器人之间的连接桥梁。
纵观2022年全年,我们更新了所有后处理器,使其运行更加顺畅。我们还对特定机器人品牌的后处理器进行了进一步更改,包括科马、川崎、Kinova、Omron、TM、FerRobotics、Epson和UR。
6.Docker image,简化高级机器人编程
今年早些时候,我们宣布推出新的RoboDK Docker image。这允许你通过直观的编程界面访问RoboDK的更高级功能。
Docker是一个用于开发、共享和运行应用程序的开源平台。它的功能允许你使用RoboDK做一些非常酷的事情,包括将机器人编程功能作为微服务运行、与连续交付工作流集成以及远程运行RoboDK API。
7.现已支持WLKATA Mirobot机器人和后处理器
我们一直为新的机器人型号和品牌提供支持。最近新增的一款是WLKATA Mirobot。这是一款6自由度的微型机器人手臂,用于桌面智能工厂模拟和教育应用。
Mirobot已经在全球各个教育机构中使用,包括代尔夫特理工大学、布朗大学和澳大利亚国立大学。
8.Weave Generator应用程序–掌握机器人焊接的艺术
你可能还没有听说过的一个新功能就是我们全新的WeaveGenerator应用程序。这是专门为提高机器人焊接轨迹编程时RoboDK中焊接模拟的质量而设计的。
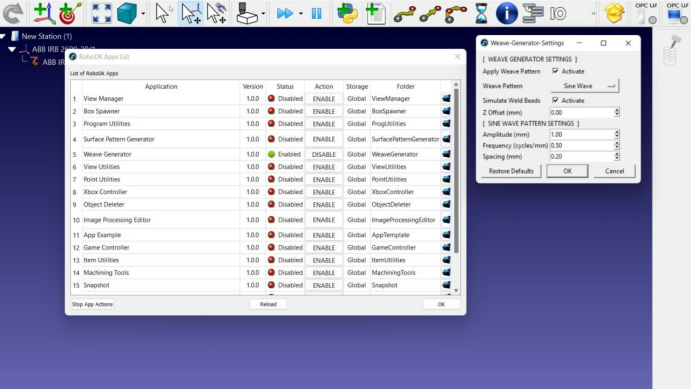
Weave Generator提供了一种快速向焊接路径添加波形的方法。正弦波焊接模式已被证明可以显著减少焊接过程中传递到金属中的热量,并产生非常平滑的焊接电弧。
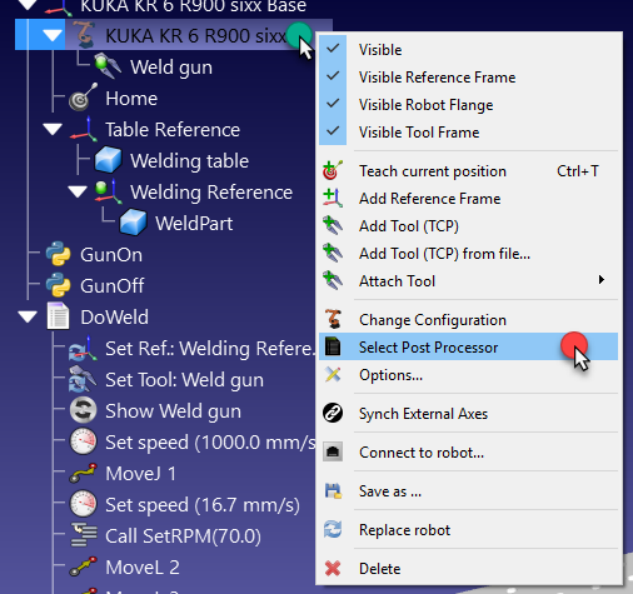
你可以使用我们的App Loader界面访问该应用程序,虽然不常用,但该界面可用于更多实验性功能。只需激活App Loader插件(通过“工具”菜单)。然后,输入工具菜单中显示的新应用程序列表并启用WeaveGenerator。
9.使用BobCAD CAM插件获取高级CAD/CAM
我们去年早些时候宣布的另一项功能是与流行的CAD/CAM软件包BobCAD CAM集成。
如果你是BobCAD的用户,这个新插件使机器人加工比以前更容易。它允许你创建复杂的加工路径,并将其直接发送给机器人。
10.自动引导车辆(AGV)加入混合
我们的用户使用RoboDK编程的大多数机器人都是工业机器人——可能是6 DoF机械手、SCARA机器人、Delta机器人等。但这一切可能都将改变。
我们最近增加了我们的第一款自动引导车辆(AGV)机器人Omron LD-60(可通过机器人模型库查看下载)的模拟。这为RoboDK提供了更复杂的机器人应用程序,包括移动机器人,目前该选项不包括离线编程。用户可对其进行模拟,在RoboDK中编程使它们移动,但暂时不能将代码导出到AGV实车中。
然而,通过模拟,你可以测试机器人项目的可行性,并验证6轴机器人与AGV的交互作用。
正如你所看到的,我们对RoboDK进行了很多很棒的更新和添加。现在已经到了2023年,我们已经计划了更多的改进和功能,以使我们的软件对我们的用户更加有用。
如果你和我们一样对我们的更新感到兴奋,请关注此博客吧!


One Comment on “RoboDK的10项新升级!”