RoboDK发布了TwinTool,这是一种为工业机器人提供全自动机器人工具校准的应用程序。TwinTool是一种经济高效、快速且简单的解决方案,可在各种制造应用中提高工具的精度。相比于目前市场上昂贵且复杂的机器人校准服务,TwinTool更具有竞争力。
工业机器人越来越多地用于高精度制造任务,如装配、焊接和加工。然而,首次使用机器人的用户有时会因为较低的精度而不满。因此,他们投资昂贵的机器人校准系统,试图提高精度。
RoboDK的CEO Albert Nubiola解释道:
“许多用户还没有意识到正确校准工具的重要性。他们仍然以为需要对整个机器人进行校准。然而,正确地对工件中心点(TCP)进行校准可以获得更高的精度。”
工业机器人存在的问题:重复性高但精度低
工业机器人重复性高,但精度低。这意味着它们每次都可以移动到完全相同的位置(重复性),但它们的位置无法精准定位于坐标系(精度)。
主要有两种校准形式来提高机器人精度。机器人校准需要精密激光系统来校准机器人机构本身。工件中心点(TCP)校准是一个更简单的过程,可确保编程系统具有机器人工具的精确模型。
RoboDK软件开发人员Samuel Bertrand解释道:
“与其他解决方案(如激光跟踪器)相比,TwinTool是一种快速且价格合理的自动校准机器人TCP的解决方案。激光校准价格昂贵,许多机器人应用不需要如此高的精度。”
TwinTool通过现成的传感器实现工件校准
标定机器人工件中心点(TCP)的典型方法是四点法,该方法包括在将工件移动到具有不同方向的同一点时,获取一系列至少4个关节读数。由于用户需要手动将机器人移动到不同的位置,此过程耗时且精度较低。
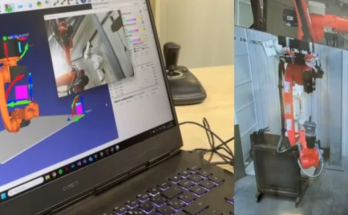
TwinTool校准功能作为RoboDK的app,该插件使RoboDK主流的机器人编程软件功能得到了扩展。
RoboDK TwinTool需要一个现成的线性仪表传感器(或LVDT)来直接与机器人通信,并在无需人工干预的情况下计算机器人工具中心点(TCP)。TwinTool自动记录无限数量的点,线性仪表传感器为工件定义提供了极高的精度。
该应用程序与Mitutoyo、KEYENCE和Sylvac等主要品牌的多种传感器兼容,可与任何硬件兼容。其他传感器品牌也可根据要求集成。
RoboDK TwinTool支持来自50家不同机器人制造商的600多个机械臂,适用于许多工业环境。
这遵循了RoboDK对硬件保持品牌不可知的既定理念。
易用性和安全性是流程的核心

同样重要的是,RoboDK非常重视其产品的易用性和安全性。TwinTool直接在RoboDK运行,在机器人控制器和传感器之间架起了桥梁。无需编程技能。用户只需用到RoboDK仿真软件、机器人、工具(球形或锥形)和传感器就可以避免奇点和碰撞,并自动计算轨迹。
“我们创建了一个用户友好的向导,以确保校准正确、安全地完成。”,Samuel Bertrand说道:“这很简单,没有机器人学知识的操作员也可以使用。”
要校准机器人工具,用户只需在RoboDK软件中执行以下三步程序:
- 从RoboDK广泛的机器人库中选择他们的机器人模型。
- 将RoboDK连接到机器人和传感器。
- 移动传感器上的机器人并开始校准。
Albert Nubiola说:
“该过程完全自动化,不需要任何手动干预。它自动避免冲突,不需要用户编写单行代码。”
精确到0.250 mm
使用TwinTool,用户可以通过一些机器人设置快速自动地将其工具的精度提高至0.250 mm。这将使精度提高2到10倍,具体取决于机器人和工具。
Albert Nubiola说:“如果没有这种校准,机器人的误差可能在2-5毫米之间。通过这种工具校准,通常可以根据你的应用将机器人误差减少到0.250-1毫米。”
这种精度改进对于大多数机器人应用来说已经足够了,即使是那些对精度有所要求的应用。这可以为用户节省大量不必要的机器人校准服务费用。
未来规划
用户现在可以将TwinTool作为可选的RoboDK应用程序添加到RoboDK软件副本中。Bertrand解释说,他们将继续改进TwinTool的功能。
“目前,该工具面向维护模式,”他说。“然而,我们正朝着在生产过程中自动运行校准程序的模式努力。”
RoboDK还计划通过创建RoboDK应用程序市场来扩展其应用程序界面。他们将邀请其它公司为该软件开发和发布自己的应用程序。

One Comment on “工业机器人的自动工具校准”