如果你像我们一样的话,就会喜欢在编程机器人过程中使用新的功能来简化任务。这就是我们十分荣幸地向你分享RoboDK在2022年五月的更新。
我们做出的这些升级使得机器人加工、制造等机器人编程方面的任务更加快速、简单和直观。
自从我们上一次在三月份更新过后,我们对软件进行了25次更新,使得软件更好用。其中包括了7个主要变更以及许多小更新。
让我们一起来看看新增了哪些东西吧。
1 改进了对SCARA机器人的支持
SCARA机器人是许多制造行业的主力机器人之一。由于它们具有高速且精度高的特点,因此常用于装配以及拾取和放置工作。
截止到编写本文的时候,我们已经支持了来自19个制造商的70款SCARA机器人,将原来的支持范围扩大了一倍。
近期,我们改善了我们对SCARA机器人的支持。以下是我们做出的一些改变:
- 改进了针对FANUC SCARA机器人的程序生成功能。
- 将官方的FANUC后处理器更名为Fanuc_R30i。
- 提高了对SCARA的全面支持。

2 改进了KUKA驱动
我们一直致力于改进软件以提高大家的使用感受。每当机器人制造商对他们的产品做出一些升级或作出一些不可替代的改变时,我们都会考虑到。
我们通过更新RoboDK来达到这一点,从而保证可以从容地处理任何情况!
我们已经对我们的KUKA驱动作出了一些轻微的改变。如果你在使用这些功能的话,这些改变会使得你的KUKA机器人编程更加容易:
最近的更新包括:
- 改进了KUKA机器人驱动,在不断开机器人控制器的情况下获取/设置变量。
- 对所有的KUKA驱动进行了常规升级。
- 改进了KUKA SRC输入脚本以支持外部轴。
3 加入了对Comua Nodal语言的支持
如果你在使用Comua的机器人的话,我们刚刚加入了一个令人兴奋的新升级。
Comua是一家坐落于意大利的知名机器人制造商。他们的机器人通过PDL2语言进行编程,这是一种他们机器人特定的帕斯卡式编程语言。Comua提供了一些示教及不同的编程方法。到目前为止,RoboDK的支持集中于使用普通PDL2编程方法的GG示教上。
PDL2的一个特性是一种基于节点的替代编程方法。我们现在已加入对这种方法的支持。大家可以在RoboDK中新的Comau后处理中找到。这提供了比我们现有后处理更多的配置选项。
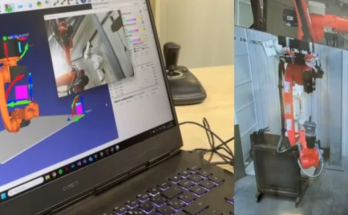
4 改进了机构创建
对于RoboDK来说,我们总是优先考虑对不同机器人的灵活性和广泛性的支持。我们的软件已经支持了来之数十个机器人品牌的上百款机器人模型,大家可以在我们的机器人在线库中找到。
但是如果你不需要使用现有的机器人的话。你绝对也可以通过RoboDK来创建任何机器人机构。
在软件中使用我们的机构模块可以十分简便地创建你自己的机器人。
我们近期在机构创建方面作出了些许的改变,包括:
- 改进了通用6自由度机构运动学。
- 将默认的新机构设置为1轴转盘。由于多数情况下人们想创建的机构类型往往是一个外部轴,所以这是十分合理的。
5 改进了机器人加工工具
机器人加工成为一个目前越来越受欢迎的应用是有原因的。这是一个极好的方式,以一个非常合理的成本来提升你的加工能力、增加尺寸以及完成复杂工艺。
我们在最新的RoboDK版本中增加了一些新的外部工具来更加简化之前的加工路径的创建。
我们升级的机器人加工工具包括:
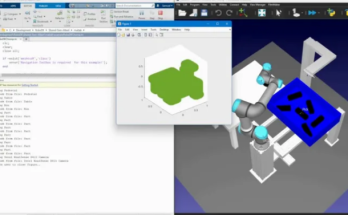
- RoboDK自动曲线提取和修改工具的升级。
- 设置当前关节选项在机器人加工目录中处于一直显示状态。
- 改进了NC代码输入以满足用户编程调用。
- 增加了一个具有更多小数位的选项来创建机器人从而在机器人加工中实现更高的精度。

6 一些使得机器人编程更简单的小改变
我们同样添加了许多小的升级来使得你在RoboDK中的编程更加简洁。
这些升级包括:
- 添加单击右键来对其参考系,从而使此步骤更快。
- 改进了在机器人和工作站上运行程序的选项。这对于具有各种运动部件的更复杂的机器人程序更实用。
- 添加了对齐目标的选项,使机器人编程中的快速对齐部分更加容易。
- 添加了一次更改对多个坐标系的支持的选项。
- 对后处理选择菜单的改进。
- 添加了导入机器脚本的选项,这是这个机器人品牌的一种特定类型的程序。
- 改进了批量编辑程序的调用指令。
- 改进的图标,使一切看起来都更整洁。
- 正式添加将零件附加到机器人连接的产检(附加部件插件)
7 改进了Matlab API(以及进一步对Python改进)
今年初,我们重新设置了Python API。这些变化为未来的软件更新设置了编程接口,并使得大家使用Python对机器人进行编程更加直观。
如今,我们又对Matlab API进行了改进。
Matlab是一款在数据科学和机器人研究应用中非常受欢迎的软件。它提供了强大的功能来分析和优化机器人设计。通过API,你可以直接通过Matlab程序来控制你的机器人、提取关节位置并且通过Matlab数据库来改进机器人程序。
另一个重要公告:TwinTool的发布
我们同样发布了一款全新的产品:
TwinTool 提供了一种简单有效且经济的方法来提高机器人工具的精度。它通过现有的线性量规来校准机器人的工具中心点(TCP)。用户经常忽略这一有价值的步骤,但是在尝试实现精确的机器人程序时,正确校准刀具中心点可以使一切变得不同。
在我们的产品页了解更多的TwinTool相关信息。
你是否有需要我们考虑的功能需求?
这就是这个月的更新了!
我们希望这些更新可以帮到你。我们团队的专家一直致力于改进软件以使得机器人编程更加适用于大众。
同往常一样,如果你有想添加的功能的话,可以通过论坛告知我们。
最后,祝大家编程顺利!