一个多月以前,我们介绍了如何选购机器人辅助定位器。那么,如果你现在正试图使用机器人定位器来扩展你的机器人性能,最好的编程方式是什么呢?有很复杂的办法,也有简单的方案。
你可能只想先让你的定位器赶紧运转起来。毕竟,硬件设备停滞的每一分钟都会带来时间和金钱上的损失。使用定位器确实是提升机器人灵活性的一个很好的办法。它可以高效地增加机器人的工作空间,让你可以从多个不同角度接触到轧件。有的定位器还可以让机器人快速地在两个工作空间中切换,减少工作的周转时间并提高生产力。
不过,增添定位器必须面临的一个难题,就是它增加了编程的难度。
工业机器人的编程本身就是较为复杂的,而如果还要增加1个或2个、甚至更多的机器人外轴,那就真的是个挑战了——除非你使用正确的解决方案。
假若你已经有过为机器人编程的经验,那么你就具备了(从零开始)为定位器编写程序的能力、它只会耗上一些时间而已。然而,如果你还从未尝试过机器人编程、就需要同时为定位器编写程序,这个难度可能足以让你对机器人自动化失去兴趣。
给定位器编程,需要从零开始学起吗?
如果你是一位熟练的程序员,你可能看一眼定位器的数据表就会想:可以试试自己的编程技术了!看是否能够运用定位器的控制输入、运动学函数,和机器人自身的编程语言,做出合适的方案。
你可能需要进入机器人论坛,问到诸如“如何为机器人加工中的定位器移动编写程序”的问题。同时,你又参阅相关的资料,尝试破解它们的运动学函数。你花了好些天来得出你自己的运动方程式,将机器人和定位器的运动联动在了一起……

这些都是一个好工程师会做的事情。我们常认为“我们可以做到”,然后就直接开始尝试和行动了。然而,我们却很少会问自己:我们是否该这么做。
问题不在于你是否有能力从零开始给一个定位器书写编码,问题在于这是否值得花费你的时间。
其实,有一个更简单的解决方案可以给定位器编程,并且完全不需要写代码。
更简单的定位器编程方式
给单个工业机器人编程的一个好处是运动学问题已被解决多次,你可以轻易找到不需要规划运动联系(Kinematics)和逆解方程式(Inverse Kinematics)的编程方法。但是当你添加一个定位器到系统中,你瞬间就把简单的6轴机械装置变为7、8、9或更多外轴的机制。
有的人会选择分别为两个机械进行编程——例如,首先粗略地移动定位器到所需位置,再为相应的工业机器人进行精准编程。然而,这并不是使用定位器的最佳方式。
通常情况下,结合定位器作为整个机械的一部分才能让你最充分地运用到它。而要达成这个目标,最简单地方式是使用一个优良的离线编程工具。
合适的软件会自动同步你的机器人与其它外轴到系统当中。如果机器人是被安装在线型轨道上的,那么软件会自动把轨道作为外部轴进行添加。如果轧件是被放置在转盘上的,软件也会自动把转盘结合到程序当中。
如何通过统一的方式为机器人定位器编程
要整合一个机器人和定位器来进行离线编程的关键,是为你的特定项目同步及优化它们的外轴。
同步机器人和定位器
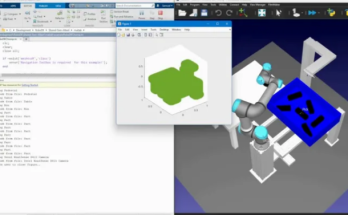
在RoboDK中,你可以通过内置的“同步外轴”工具轻易地达到这一目的。你一次可以同步最多六个外轴。这就意味着如果你在使用6轴工业机器人,系统可以为你的机械增至12轴。
这个工具会把整合后的机械作为一个一体的系统来查看。在使用机器人加工、3D打印、沿曲线加工,和沿点加工项目时,它会自动生成代码,把定位器、外轴和机器人整合到一起。这些功能被广泛应用于机器人和定位器整合的项目当中。
与你手动为定位器编码不同,无论你把机器人和定位器放在什么位置都没有关系,软件都会自动调整其代码以适应你的设定。
优化你的自动化编码
你也可以通过“智能优化”选项来对定位器进行额外的优化。优化功能让你可以为你的程序设置参数和限制条件。其选项包括:
- 优先定位器运动
- 优先机器人运动
- 为部分或全部关节“强制”期望位置(例如:当你想让机械腕关节维持在一个特定角度)
- 让一些关节的运动最小化(例如:保证定位器总是渐进地运动,而不会产生突发或意外行动)
你可以在RoboDK的教程页面找到更多关于这些工具的介绍。

开始为机器人定位器编程
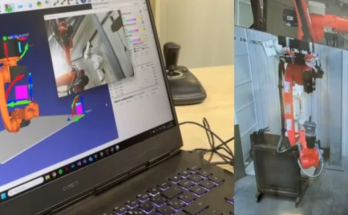
无论你的编程技术在何种程度,为定位器编程也未必是个困难的任务。通过使用正确的软件工具,为你的系统编写代码也可以像给工业机器人编程一样便捷。
你可以通过免费试用版,尝试RoboDK的工具。通过“机器人加工与轨道和转盘”(Robot machining with a rail and turntable)案例,你可能会找到属于你项目的灵感。