“如何创建工具”是我们RoboDK用户讨论最热门的话题之一……这是有充分理由的!无论您是新用户还是只想简化流程,添加自定义机器人工具都是机器人编程的一项基础技能。
我们RoboDK论坛上浏览量最高的讨论话题之一就是“如何创建工具”。
在本指南中,我们将带您了解使用RoboDK进行编程的基础步骤。
让我们开始吧!
步骤1:检查机器人库中是否有合适的工具
在决定向RoboDK中创建自己的自定义工具之前,请检查我们的机器人库中是否已经有一个可用的工具。
我们已经集成了超过一百种工具模型,可立即用于您的机器人项目,包括夹具、激光切割机、分配器、砂光机等。
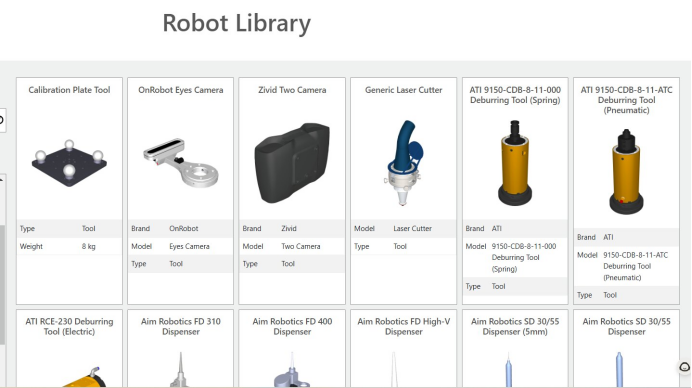
如何在RoboDK中使用现有工具
要浏览已有的各种工具,请查看我们机器人库中的“工具”部分。
然后按照以下步骤加载模型:
- 打开RoboDK并加载您的项目文件或创建一个新项目。
- 在在线机器人库中找到您想要使用的工具。
- 点击“下载”将工具文件下载到您的计算机上。
- 将工具文件拖放到仿真工作区,或者使用“文件”>“打开”来定位并加载模型。
步骤2:将3D对象导入RoboDK
有时,您可能想要创建自己的自定义工具,以完美满足应用程序的需求。
在RoboDK中创建自己的自定义工具首先要有一个3D模型。这个文件可以由制造商提供(如果您使用的是购买的工具),也可以自己创建。
请记住,3D模型可以很简单。它不需要包含工具的所有复杂结构。该模型只需要包含足够的细节来对机器人进行编程即可。
RoboDK支持多种3D文件格式,包括STL、IGES和STEP。
如何将工具文件导入RoboDK
以下是将工具的3D模型导入仿真的基本步骤:
- 打开RoboDK并加载您的项目文件或创建一个新项目。
- 将您的3D文件拖放到工作区,或者使用“文件”>“打开”来定位并加载模型。
导入的模型现在将作为对象出现在项目树中。
步骤3:将对象转换为工具
将工具作为3D对象导入后,需要将其指定为机器人工具。这样RoboDK就知道将其视为可编程工具,而不是基本对象。
为此,请按照以下步骤操作:
- 在“程序自由”中的“对象”部分内,将导入的模型拖放到机器人模型上。
- 查看仿真窗口中的工具,检查它是否正确地附着在机器人法兰末端。
如果一切正常,您现在应该会看到工具被列为机器人模型的子项,并且3D模型应附着在机器人末端。
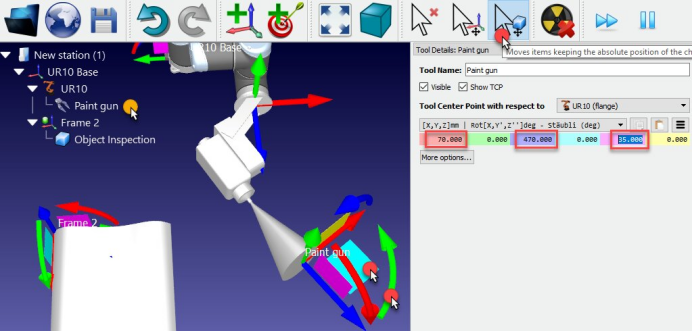
步骤4:调整工具中心点
正确配置的工具中心点(TCP)通过定义工具的操作点来确保机器人程序的准确性。例如,两指夹具可能需要将TCP精确放置在两根手指之间。
RoboDK提供了两种在仿真窗口中调整TCP的方法:
- 手动输入:双击程序树中的工具。在“工具详情”窗口中输入确切的X、Y和Z值来调整TCP。
- 交互式调整:按下Alt + Shift键,并使用鼠标在仿真窗口中动态重新定位工具的TCP。
现在,您可以开始使用新添加的工具对机器人进行编程了。
步骤5:为多工具系统添加工具更换器
如果您的机器人系统在操作过程中需要切换工具,RoboDK支持工具更换器来简化流程。
工具更换器可以简化诸如加工、装配、检测等需要多种工具的任务流程。
有关向项目中添加工具更换器的详细指南,请参阅我们的文章《如何在RoboDK中使用工具更换器》。

步骤6:使用宏增强灵活性
如果您想进一步扩展工具的功能,机器人宏是预先编写的序列或函数调用,可自动化特定任务。
当使用具有附加功能的工具时,宏非常有用。它们可以让您轻松执行重复性编程任务,例如操作主轴工具、模拟焊接工具、将物体附着到夹具工具上等等。
有关宏的强大功能,请参阅我们的文章《如何在RoboDK中创建强大的机器人宏和自定义工具》。
借助RoboDK的全面文档,充分发挥机器人工具的潜力
在本指南中,我们已经为您提供了在RoboDK中创建工具的基本要素。然而,我们在大量官方文档指南中还提供了更深入的教程。
文档为您提供广泛的指导,包括:
- 分步教程,详细讲解在RoboDK中使用自定义工具的细节。
- 配有易于理解的图片和视频,针对各种工具编程任务提供操作说明。
- 关于如何克服常见障碍以及使用关键功能(如手动输入)的提示。
- 实际示例,展示如何使用工具,并在RoboDK安装中提供相应的项目文件。
无论您是刚开始在RoboDK中使用工具,还是经验丰富的用户希望掌握高级工具编程,我们都有丰富的资源可供您充分发挥所选工具的潜力。