
在工业机器人领域,定制不仅仅是“锦上添花”。这是灵活运营成功的必要条件。而自定义工具和宏可以成为这种灵活性背后的驱动力。
自定义工具和宏都可以自动执行更复杂的机器人任务,并根据需求调整基本的机器人硬件。
RoboDK提供了各种功能来创建强大的机器人宏。有了这些,您可以通过添加其他方案无法提供的额外功能,将机器人部署提升到新的高度。凭借对自定义工具的支持,可添加的机器人配件限制不再存在。
以下是如何利用自定义宏和工具的强大功能:
机器人宏在简化复杂任务中的作用
在工业机器人中,宏本质上是预定义的命令或脚本序列,自动执行复杂的编程任务。
例如,宏脚本会将特定的输入或机器人命令转换为所需的输出。它们可用于控制RoboDK中的模拟机器人或工作区中的物理机器人。
例如,使用机械臂完成焊接任务。宏可以自动使机械臂沿所需的焊接路径运动,操作特定的焊接工具,甚至可以动态调整焊接参数以适应更复杂的焊接操作。

在RoboDK中创建第一个机器人宏
如何在RoboDK中为机器人程序创建宏。
以下是实施过程:
- 首先在没有宏的情况下创建模拟。尽可能多地使用RoboDK的基本功能,以确定真正需要自定义宏的位置。由于RoboDK具备一系列令人印象深刻的内置功能,所以您可能到最后会发现并不需要宏,。
- 选择编程语言。您可以使用您最熟悉的编程语言在RoboDK中对宏进行编程。RoboDK的API已经与Python,C#,C++和Matlab等流行语言无缝集成。
- 创建和优化宏脚本。创建一个宏脚本来执行所需的功能。越简单越好,只添加真正需要的功能。
- 激活并测试宏。将宏加载到RoboDK仿真环境中,并对其进行测试。您可能需要调整脚本以使其就绪。
- 持续改进。最有用的宏是那些随着时间的推移而优化的宏。尽可能在您注意到可以改进现有宏的方法时,对宏进行改进。
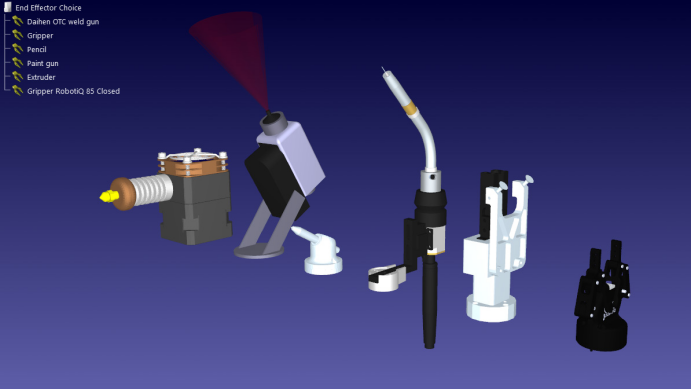
自定义工具:RoboDK中的核心之一
RoboDK中的一个相关核心是自定义工具。这就允许您将任何工具或末端执行器添加到您的机器人程序中。
市场上有太多的机器人工具,我们无法将它们全部纳入机器人库。通过提供这种集成自定义工具的方法,您甚至可以在RoboDK中为机器人程序自定义设计的专属工具!!
您可以在我们的文章《在RoboDK中使用任何末端执行器的5分钟指南》中找到添加自定义工具的完整指南。
帮助您入门的 7 个示例宏
当您看到已经存在的示例时,更容易理解您可以用宏实现什么。
宏功能可以很复杂,例如使用机器人运行整个程序,也可以很简单,例如打开单个输出来激活工具。
以下是RoboDK中包含的众多示例宏中的7个:
- CameraLiveStream——此宏演示了使用RoboDK API处理2D摄像机的一些基本功能,例如设置摄像机参数和实时显示。
- DoPointWeld——此宏演示了模拟点焊枪,允许您打开和关闭焊枪。这是汽车制造等焊接应用的理想选择。
- Draw_SVG——此宏对机器人进行编程,以使用 SVG 图像文件作为输入来绘制图片。当您为客户设计个性化产品时,这可能特别有用。
- MirrorRealRobot——此宏创建一个桥接,用于移动物理机器人以匹配模拟机器人。例如,您可以使用它通过 3D 鼠标或其他输入设备控制您的机器人。
- SetTool_ID——这个简单的宏将机器人的工具更新为给定的标识号,并将其作为参数传递。例如在 CNC 加工中的刀具更换。
- SpindleOn—此宏允许您为材料的表面涂层添加轨迹或进行喷镀。
- WaitDI —此宏模拟对虚拟输入的等待,该宏对应的就是真实任务中的等待。
这些只是RoboDK中已经存在的机器人宏的几个例子。如您所见,这种简单的编程有广泛的用途。

机器人宏和定制工具的交集:工业机器人的范式转变
机器人宏和自定义工具都是简单但非常强大的概念,可以将您的机器人部署提升到另一个层次。
通过结合这两个概念,您可以构建任何您需要的功能和机器人程序。
如果您不确定如何对特定的宏功能进行编程,可以从我们的RoboDK文档开始,该文档提供了大量的说明。其中还包含了关于添加自定义工具的部分。
如果您遇到困难并且对开发脚本有任何疑问,那么在RoboDK论坛中进行提问不失为一个好方法。



One Comment on “如何在RoboDK中创建强大的机器人宏和自定义工具”