
Automatica展会上的杰出创新之一便是先进的机器人夹具,为物料搬运技术树立了新标准。得益于多项技术突破,这些抓手已经更智能、更快、更灵敏。尽管机器人夹持器是生产线上的新成员,但它们的作用正迅速变得不可或缺。
机器人夹具的进步
尖端技术的融合
这项创新的核心在于顶尖技术的融合。例如,计算机视觉的集成增强了机器人夹具的能力,使它们能够检测半透明和反光的物品,克服了以前机器人搬运的视觉限制。其最终目标是为机器人装上眼睛,使机器人能够类似于人类一样感知物体。
神经网络
此外,神经网络与计算机视觉的融合使系统能够分割、分类和精确定位物体上的最佳抓取点。这对于物品拣选和托盘卸垛等操作十分有利。随着各行各业对效率的不懈追求,速度成为一个关键因素。
混合夹具:两全其美
新时代的混合夹具巧妙地将吸盘的优点与夹持技术相结合。虽然吸盘在物品分离方面表现出色,但夹持保证了稳定的运动。这种混合方法有助于机器人更快地运动的同时,处理不同重量、形状和质地的各种物品,在某些情况下,吞吐量可从之前的每小时300-400件提高到惊人的1200件。
物料搬运
传统上,物料搬运多依赖于体力劳动。但是,有了新的机器人,材料加工的速度可以达到人类操作速度的四倍。在连续的三班制周期中,单个机器人的生产力相当于10到12个人的生产力,这往往代表着可观的投资回报。
当然,安全仍然是最重要的。现代机器人夹具具备一系列安全功能。这些设备擅长障碍物检测和快速反应,降低了事故风险。此外,这些夹具还带有内置的故障安全机制。如果出现任何异常情况,它们会停止操作,或切换到安全模式,从而将潜在威胁降至最低。
创新塑造未来
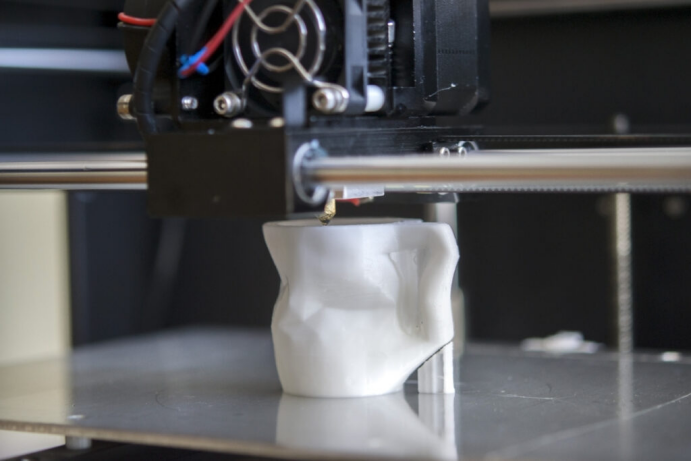
机器人夹具市场正在见证一些引人入胜的创新。例如,在增材制造(也称为 3D 打印)中,通过逐层构建数字文件来创建三维对象。加拿大制造商Anubis 3D[SC1]将这种技术用于一系列机械臂末端工具(EOAT),包括夹具。增材制造能够以最小的浪费、降低模具成本和快速迭代设计的能力创建轻巧、复杂和定制的形状。
机器人夹具的另一项重大创新是触觉反馈,它显著增强了机器人的处理和操作能力,使其更接近人手的灵敏度和适应性。触觉传感器可以检测压力和质地的细微变化,使机器人能够精确调整其握力。在处理精致或形状奇特的物体时,这种精度至关重要,因为它可以降低损坏的风险。
配备触觉反馈的机器人无需预先编程即可处理各种材料和形状。此外,通过优化抓握力,机器人可以使用更少的能量来牢固地固定物体,从而实现更高效的操作。最后,触觉数据可用于机器学习,使机器人能够根据以前的经验和交互随着时间的推移提高其性能。
通过RoboDK激发机器人夹具潜力
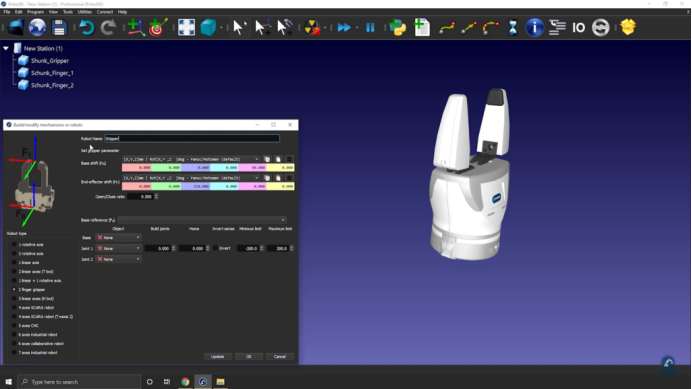
仿真软件可以帮助工程师探索新型夹具技术的不同优势及其对机器人自动化过程的影响。RoboDK有不同的工具来对夹具进行建模,从而获得周期时间估计,甚至通过RoboDK的API测试视觉算法。这些创新的可视化方法可以帮助客户在投入物理硬件之前更好地了解使用这些新技术的效果并进行改进。
准备好通过RoboDK探索机器人夹具的强大功能了吗?立即迈出彻底改变机器人编程和可视化流程的第一步。获取RoboDK的试用许可证以了解更多信息,并开始您的机器人编程之旅。


