
何时使用RoboDK的桌面版、网络版、移动版和嵌入版
RoboDK有多种版本,包括电脑版、网页版和移动版。问题是,哪一个最适合你的需求?RoboDK拥有广泛的产品系列。与同类产品不同,RoboDK的不同版本不按应用领域分组。 RoboDK的所有版本都提供相同的机器人编程内容,适用于所有机器人应用。您还可以通过RoboDK许可证来使用所有版本。 不同的版本为不同的设备提供支持。
继续阅读工业机器人应用从未如此简单
RoboDK有多种版本,包括电脑版、网页版和移动版。问题是,哪一个最适合你的需求?RoboDK拥有广泛的产品系列。与同类产品不同,RoboDK的不同版本不按应用领域分组。 RoboDK的所有版本都提供相同的机器人编程内容,适用于所有机器人应用。您还可以通过RoboDK许可证来使用所有版本。 不同的版本为不同的设备提供支持。
继续阅读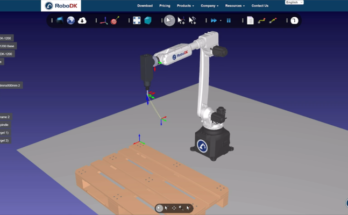
机器人编程软件RoboDK近日发布了一个新的网络版本。这个简化版无需许可证,为销售代表、机器人新用户和教育提供了一个便携的、简化的界面。 创建令人信服的机器人解决方案销售演示并非易事。机器人经销商通常通过模拟来让客户理解他们的解决方案,但是这些模拟并不方便。
继续阅读
一个多月以前,我们介绍了如何选购机器人辅助定位器。那么,如果你现在正试图使用机器人定位器来扩展你的机器人性能,最好的编程方式是什么呢?有很复杂的办法,也有简单的方案。
继续阅读
每个机器人编程人员都有自己的编程偏好,今天我们介绍自定义RoboDK界面的10种方法,以方便用户使用。
继续阅读
你是否还在犹豫着要为你的机器人程序建模,却对质量不高的CAD模型有所担忧?别担心!RoboDK最新开发的Solid Edge插件可以帮你通过软件内简便的机器人编程操作,实现同步设计的强大功能。
继续阅读
上个月,RoboDK又有主要的新版本发布了,它包括很多最新的功能!与过去相比,除了性能有了更多的改善以外,我们还提高了与更多机器人、机器人工具的兼容性,优化了技术支持功能。
继续阅读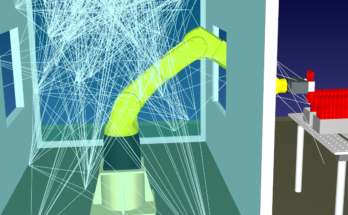
正如我们前面介绍的,运动规划器减少了人工机器人编程的工作量,但是从“付出=回报”的商业角度来看,它到底值不值得投入使用呢? 正如我们前面介绍的,运动规划器减少了人工机器人编程的工作量,但是从“付出=回报”的商业角度来看,它到底值不值得投入使用呢?
继续阅读
在工作中,我们并不总能保证自己的工作空间是整洁与自由开放的。这对于机器人的工作空间也是一样的道理。
继续阅读
“回到基础”这个系列意在为读者介绍与工业机器人相关的基础知识。事实上,之前我们介绍欧拉角与几何旋转原理的文章,是本站阅读量最高的博文之一。
继续阅读
Rhino软件的灵活性,加上强大的CAM工具,再加上RoboDK的机器人编程技术,可以给用户带来不可估量的工作成效。想要把三者结合在一起,你只需使用RoboDK最新的RhinoCAM插件就可以了!
继续阅读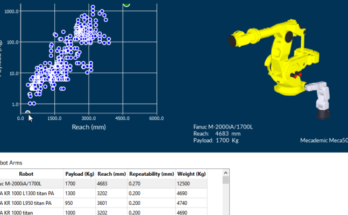
一台机器人的“工作范围”会对应用中的很多其他参数产生影响,比如工件的尺寸和对外部轴的需求等等。你知道对你而言最适合的机器人工作范围是多大吗?
继续阅读