理解和校准您的机器人对于需要精度的应用非常重要。这些RoboDK插件提供了全面优化您机器人的功能。
机器人校准往往是自动化领域的无名英雄。人们总是意识不到,机器人可以达到的精度在很大程度上取决于它的校准程度。在RoboDK,我们一些最受欢迎的功能、产品和服务都与校准有关。
在我们的RoboDK Marketplace中,还有各种插件可用于改进数据分析和校准。这些扩展了RoboDK针对特定任务的功能。
以下是用于理解、分析和校准机器人的7个出色的插件:
1.机器人图表
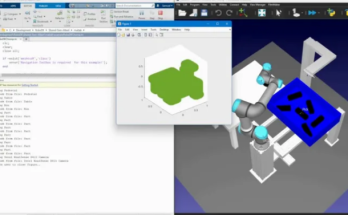
RoboCharts为您提供了在RoboDK中以图形方式分析机器人的轨迹和关节使用情况的工具。当您希望确定可以改进的机器人程序的各个方面时,这是理想的选择。
Add-in适用于谁?
RoboCharts 对于希望更深入地研究机器人数据和分析的工程师和程序员特别有用。它可以帮助您识别效率低下的地方并收集数据以进行报告。
它有什么作用?
该插件提供了与机器人轨迹和关节活动相关的一系列统计数据的深入图表。
功能包括:
- 在 XY、XZ 和 YZ 平面上可视化 3D 机器人轨迹和 2D 投影。
- 随时间进行位置跟踪,以进行准确的轨迹分析。
- 详细的关节使用指标,例如关节范围、配置和一段时间内的分布。
2.可达性
可达性可帮助您预览机器人可触及的工具姿势,让您看到其工作场所中定位任务的最佳区域。
Add-in适用于谁?
任何想要从机器人学中最有用且被低估的工具之一——可达性分析中受益的人都适合使用该插件……
虽然我这么说可能有点偏向,因为我的博士部分研究内容就是可达性分析。但这确实是一种非常有用的技术,可以全面了解您机器人的能力和局限性。
它有什么作用?
Reachability插件提供可达和不可达工具姿态的可视化预览,有助于快速有效地识别运动限制。
功能包括:
- 可视化机器人手臂和工具,以清晰了解伸展能力。
- 突出显示可达和不可达姿态,以实现精确的运动规划。
- 可自定义参数,包括平移和旋转允许量,以根据项目需求定制可达性分析。
3.机器人校准工具
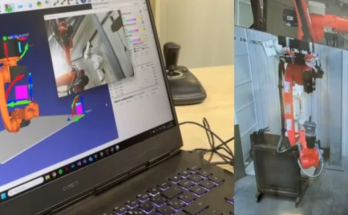
机器人校准工具提供了一系列非常有用的工具,可以直接在RoboDK环境中校准您的机器人。
Add-in适用于谁?
该插件适用于希望从其工业机器人中获得最大准确度和精度的任何人。它被设计为一种校准工具的瑞士军刀,您可以使用它来自己校准您的机器人或在帮助下校准您的机器人。
它有什么作用?
校准工具为机器人校准提供了多种功能,包括生成校准目标和运行验证测试。
功能包括:
- 为各种测量设备生成校准目标,包括激光跟踪仪和坐标测量机(CMM)。
- 进行可重复性测试,例如ISO 9283,以验证机器人性能。
- 使用工作区定义感兴趣区域,以进行重点校准和测试。
4.扫掠空间
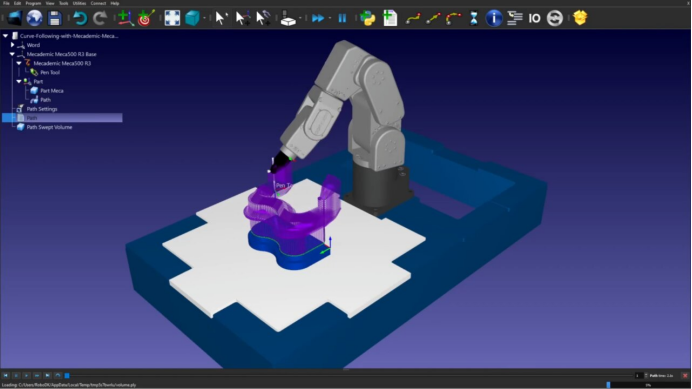
扫掠空间允许生成3D体积,以表示当前机器人程序的机器人工作包络。这建立在可访问性分析的效用之上,但针对特定任务。
Add-in适用于谁?
当您希望直观地表示机器人在其当前程序过程中占用的所有空间时,该插件是理想的选择。它可以帮助进行工作流程规划、单元格设计和产品生成可视化。
它有什么作用?
Swept Volume为给定程序生成机器人工作包络的详细3D模型,从而准确表示其真实工作区。
功能包括:
- 创建机器人工作包络的3D表示以实现可视化和规划。
- 可调节的采样尺寸以提高质量和精度。
- 在扫掠体积上生成凸包以简化几何分析。
5.TwinTool
TwinTool 是与我们的自动化解决方案相关的插件,用于高精度校准机器人工具。
Add-in适用于谁?
TwinTool解决方案专为使用现成传感器进行精确的机器人校准而设计,可实现高达0.250 mm的刀具精度。它有助于提高机器人在加工、焊接、检查等依赖于精度的任务中的精度。
在Twin Tool产品页面上了解更多信息。
它有什么作用?
该插件使用现成的线性量具传感器实现无缝的机器人工具校准。它执行一个自动校准过程,直接与您的RoboDK程序集成。
功能包括:
- 具有自动防撞功能的球形和锥形刀具的校准。
- 支持多个线性量具传感器品牌,包括Mitutoyo、KEYENCE和 Sylvac。
- 校准结果的可视化和历史跟踪,以实现过程优化。
- 与来自1000个不同制造商的80多个机器人集成,使其具有广泛的兼容性。
- 传感器精度为0.001 mm的自校准,确保可重复和可靠的结果。
6.球杆仪跟踪器
Ballbar Tracker使您能够执行标准的球杆跟踪程序来进行机器人校准,从而测量机器人的性能并验证其准确性。
Add-in适用于谁?
当您希望验证您的机器人是否达到特定应用程序所需的精度时,该插件是理想的选择。如果您的机器人在性能要求严格的行业中运行,则此功能将特别有用。
它有什么作用?
Ballbar Tracker允许您将球杆仪机构连接到机器人上,利用其功能来测量和分析机器人的操作精度。
功能包括:
- 通过UI或API在RoboDK中连接和拆卸球杆,以实现流畅的操作。
- 测量和记录机器人随时间的精度退化情况,以便进行维护规划。
- 生成圆形路径和自动测量,集成Renishaw QC20 – W球杆等工具以实现精确报告。
- 验证机器人精度,无论是静止还是移动的工具中心点(TCP)方向。
有关此过程的更多详细信息,请参阅我们关于球杆测试程序的专门页面。
7. 循环时间
Cycle Time 提供了一个全面的工具箱来估计和优化机器人程序的周期时间,提供提高系统效率的关键指标。
Add-in 适用于谁?
该插件非常适合通过减少不必要的移动来优化您的机器人程序。它允许您在编程过程中做出数据驱动的决策。
有关周期时间优化重要性的更多信息,请参阅我们的文章机器人周期时间:如何计算和优化您的时间
它有什么作用?
Cycle Time提供了一系列用于优化周期时间的功能和工具,包括提供关键的周期时间指标,例如行程长度和程序运行时间。
功能包括:
- 估计多个机器人程序的周期时间,以确定优化机会。
- 将周期时间分析报告另存为。CSV文件进行跟踪和记录保存。
- 根据机器人速度和加速度比较性能指标,帮助用户平衡生产力和准确性。
- 支持深入的时间研究,以评估路径调整、速度优化和操作大致的影响
通过行业领先的机器人校准技术了解有关您的机器人的更多信息
当您拥有充分了解、优化和校准机器人的工具时,您可以显着改善其操作。
通过将这7个RoboDK插件添加到您的编程工作流程中,您将能够更好地理解您的机器人,分析其性能并对其进行校准以获得最大精度。
如果您想使用我们广受欢迎的校准服务对您的机器人进行全面校准,请查看我们的校准产品页面。