在上一篇文章中,我们列举了最常见的几种工业机器人离线编程应用——其中是否包括你需要实现的任务呢?不管答案是什么,你或许都想知道是哪些因素决定了更有效的离线编程应用,今天我们就详细介绍这些因素。
四个决定因素
一、离线编程工具是否支持你的机器人型号?
当选择离线编程工具时,用户需要了解每款工具都有它的不同之处,最根本的问题就是,它是否支持你正在或者将要使用的机器人型号。由机器人生产商提供的编程软件只适用于本品牌产品,所以,如果你不想局限于同一品牌所提供的技术,甚至希望来自不同品牌的机器人可以协作完成任务,那么你就需要选取一款通用的机器人编程软件了。毕竟,各个生产商都有自己的长处与特点,不断了解与获取最新的技术有助于更好地开展工程项目。
你的机器人是什么型号?在RoboDK的模型库里找一下吧。如果没有,联系我们帮助你添加。
二、机器人硬件是否兼容软件编程工具?
不是所有的工业机器人生产商都提供离线编程工具,如果你只依赖于“原厂产品”这会给你带来麻烦。通用的离线编程软件则支持多个品牌、多种型号的机器人,这可以给用户带来很大的便利。然而,通用软件的功能需要在硬件的全面支持下,才能充分发挥作用。例如,如果机器人控制器坚持只“阅读”以其独有方式编译过的程序,那么,通用编程工具就不能生成有效的机器人程序。
RoboDK全面支持知名品牌例如ABB,KUKA(库卡),Fanuc(发那科),UR(优傲)等等,欢迎联系我们咨询。
三、离线编程工具的功能
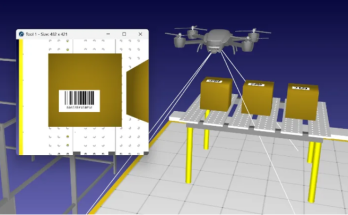
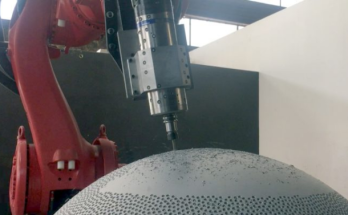
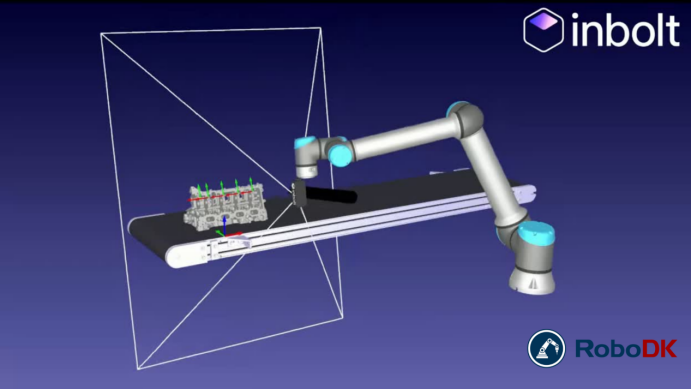
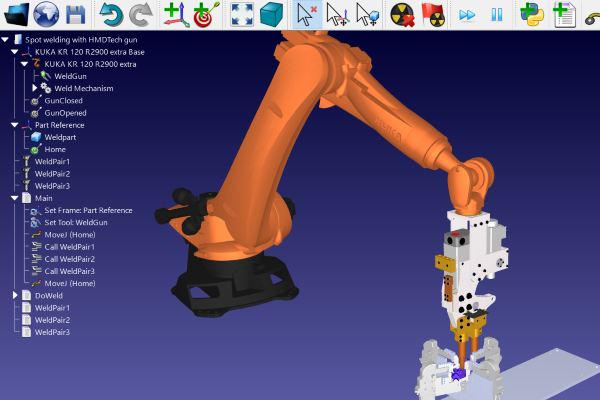
离线编程工具的功能可以有很多,包括机器人逆解运算,路径计划与优化,速度设定,方向与位姿设定,碰撞探测,奇点状态测试等等。如果机器人硬件全面支持离线编程工具,可以在仿真测试后直接生成机器人程序,甚至在编程软件中连接机器人,直接发送程序、在线调试。离线编程工具的延伸功能,往往包括仿真以及驱动传感器来配合机器人设备的使用,解析3D模型,利用几何表面或者数控G代码程序生成机器人路径等等。
以上的这些功能,都可以在RoboDK中找到。
四、技术人员的专业知识
一些传统的离线编程功能(例如在汽车工业),需要使用复杂的软件工具,由高级技术人员花费大量时间完成。RoboDK软件工具界面友好,将复杂的任务简单化,因此对技术人员的要求也就降低了。
当然,一款好的软件让高级用户有更多的发挥空间,例如RoboDK的应用编程接口(API)就是这样。