最近,在与FORCE Technology和Hexagon Manufacturing Intelligence的合作中,使用了ESPRIT添加工具路径编程,利用RoboDK的仿真软件编程了工业机器人。ESPRIT和RoboDK是工具路径编程和机器人数字孪生的强大组合,具有后处理和分析功能,用于创建最终零件。
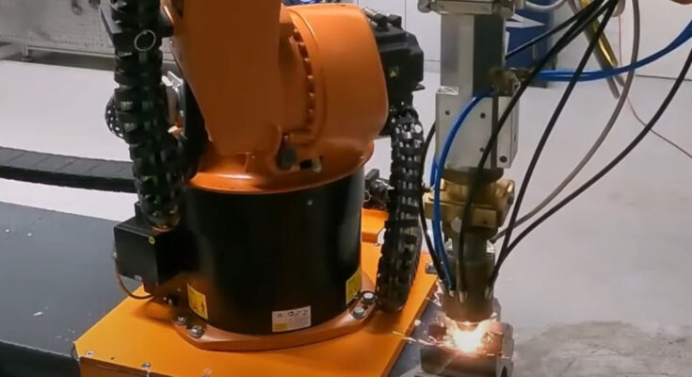
该系统包括一个安装在轨道(线性轴)上的6轴KUKA机器人臂,一个可倾斜的转台用于旋转操作,以及一个主轴。此外,GTV堆焊头(粉末+激光)使添加功能成为可能,使装载Steel 4140零件的整体循环时间为5分钟。该项目通过一个真实的应用实例,研究了FORCE Technology设置中的数字链。
FORCE Technology在考虑到其环境责任的同时,通过修复齿轮而非更换齿轮,避免了丢弃整个零件以及浪费材料和劳动成本。此外,通过消除更换零件的需要,他们降低了停机时间和成本。该项目是机器人集成如何改善维修保养和操作(MRO)以减轻可持续性问题的成功示例。

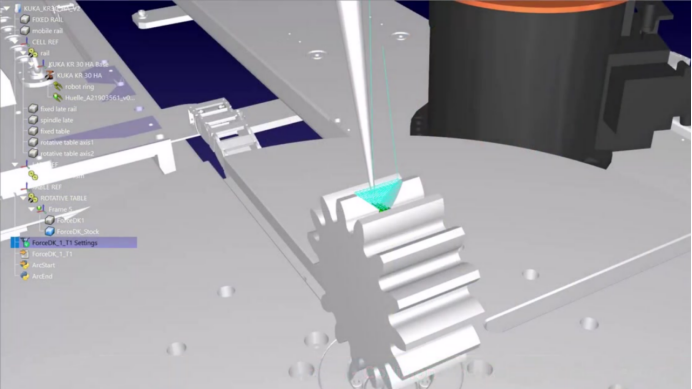
FORCE Technology使用ESPRIT和Hexagon的“混合”CAM来编程添加头部路径规划,并使用RoboDK解决运动学和碰撞问题,生成机器人代码,为增材制造创建工具路径轨迹。此外,ESPRIT中的RoboDK扩展简化了系统之间的通信,使终端用户更加便利。总体而言,FORCE Technology使用数字孪生和后处理完成了MRO应用,以改善焊接质量和减少废料。丹麦制造学院(MADE)为该项目提供了资金支持,使其取得成功。
如何通过RoboDK的机器人仿真帮助减轻可持续性问题
与制造全新零件相比,公司可以通过修复带有缺陷或损坏的大型组件来减少碳排放。
FORCE Technology的增材制造专家Ivar Dale提到:
这个项目是齿轮修复变得更加标准化的重要一步,并获得了修复齿轮再次投入使用所需的质量保证和信心。我们成功地实现了打印齿轮上原始齿的相同硬度。
RoboDK仿真离线编程工具还可以减少由车间编程引起的生产停机时间。公司可以在RoboDK的虚拟环境中测试机器人的能力。
此外,Dale继续说道:
使用ESPRIT/Hexagon的路径规划增材解决方案和RoboDK的后处理器,我们节省了大量时间来编程1mm的正偏移路径,因为齿形是有机的。这样可以节省我们在打印过程中的时间,尤其是在更大的修复中,但也节省了齿轮制造商的时间,因为我们添加的材料非常坚硬,每毫米都需要仔细进行CNC加工。
通过RoboDK工业模拟器改善激光焊接计划
RoboDK是一款经济智能、高效的工业机器人和机器人编程模拟器。它消除了现场编程的需要,优化机器人路径以避免奇点、轴限制和碰撞。由于其创新设计,不需要编码经验。
通过将RoboDK与其他系统(如ESPRIT和Hexagon的“Hybrid” CAM)结合使用,公司可以开发可持续生产流程。它降低了能源消耗,并减少了操作过程中产生的废物。
使用RoboDK的仿真和离线编程工具可以帮助公司降低生产成本和停机时间。此外,它还能减少生产周期中产生的危险材料。这些优势使RoboDK成为希望减少环境影响的公司的宝贵工具。如果您的企业致力于可持续发展,RoboDK可以帮助您实现目标。
将RoboDK与其他软件解决方案结合使用,可以帮助企业开发可持续生产流程。这将确保公司致力于解决可持续性问题,并确保其生产流程与最新的行业标准相符。要利用RoboDK的机器人仿真的好处,请访问我们的网站。查看博客和其他资源,并探索可用的功能范围