At RoboDK, we are always striving to make sure our software is up-to-date with the latest robotic technologies and features.
We regularly release articles explaining the newest features you can access in the latest version of RoboDK.
What other features did we add lately? There were a lot of them!
Here are 10 of the amazing features we added to RoboDK that you might not have heard about:
1. Effortless TCP Calibration with RoboDK TwinTool
A huge announcement that we made earlier in 2022 was the introduction of our TwinTool product. TwinTool allows you to intuitively calibrate your robot tool using an automated calibration procedure and an off-the-shelf sensor.
You can find out more about TwinTool on our dedicated product page.

2. New KUKA Bridge Driver for Better KUKA Integration
One of the most exciting updates for KUKA users this year was our introduction of the KUKA Bridge robot driver. This improves the programming experience for KUKA robots.
Improvements caused by this new driver include faster response time, automated robot search and configuration, direct file exchange, and better error handling.
The KUKA Bridge is based on the C3 Bridge driver that was developed by one of the newest members of the RoboDK development team, Dmitry Lavygin.
3. Reverse any Axis with Improved SCARA Inverse Kinematics
One feature we improved was the inverse kinematics for SCARA robots. This new capability allows you to easily reverse any axis while using this type of robot.
SCARA robots are used in a variety of applications like pick and place, assembly, and sorting. With such applications, it’s useful to be able to easily define axes in the direction that works best for the task. For example, you can flip the final axis when mounting a SCARA robot upside down.
4. Updated macOS and Linux Support & Improved Matlab API
We also recently improved RoboDK’s support for macOS and Linux. Part of our ethos here at RoboDK is that our software should work on as many hardware platforms as possible. With these new updates, we have made sure our macOS and Linux users receive the same high-quality experience as everyone else.
Thanks to Matlab’s collaboration, RoboDK has been able to improve the bridge between RoboDK’s software and the Matlab API. This allows you to better use this powerful programming environment for your robot.
5. Post Processor Updates for Better Application Performance
Post processors are a vital component of the robot programming workflow with RoboDK. They are the link between RoboDK and your physical robot.
Throughout 2022, we updated all post processors to make them run more smoothly. We also made further changes to the post processors for specific robot brands, including Comau, Kawasaki, Kinova, Omron, TM, FerRobotics, Epson, and UR.

6. Docker Image for Easier Advanced Robot Programming
Earlier this year, we announced the introduction of our new RoboDK Docker image. This allows you to access even more advanced features of RoboDK through an intuitive programming interface.
Docker is an open-source platform for developing, sharing, and running applications. Its features allow you to do some pretty cool things with RoboDK, including running robot programming features as microservices, integrating with continuous delivery workflows, and running the RoboDK API remotely.
7. WLKATA Mirobot Robot & Post Processor Now Available
We add support for new robot models and brands all the time. A recent addition is the WLKATA Mirobot. This is a 6-degree-of-freedom mini robotic arm, targeted at desktop smart factory simulation and educational applications.
The Mirobot is already being used in various educational institutions across the globe, including the Delft University of Technology, Brown University, and the Australian National University.
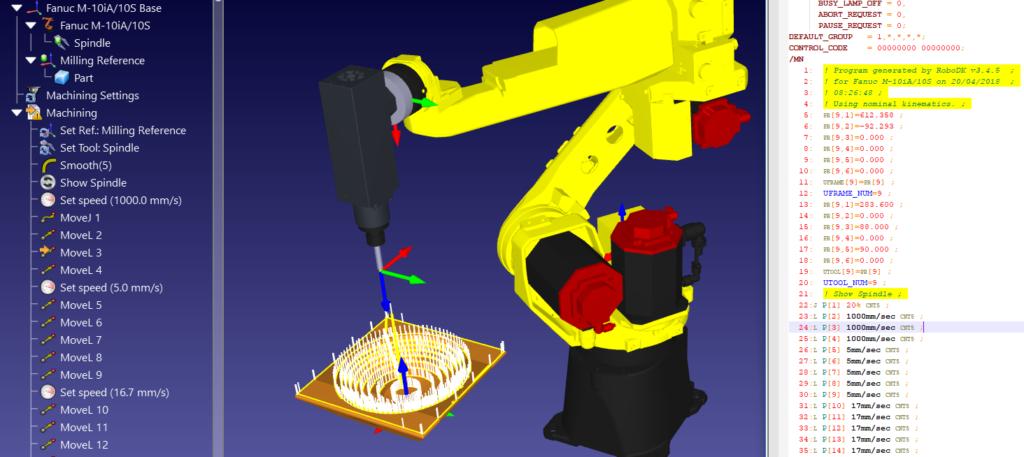
8. WeaveGenerator App – Master the Art of Robot Welding!
A new feature you might not have heard about yet is our brand-new WeaveGenerator App. This is specifically designed to improve the quality of your welds simulations in RoboDK when programming trajectories for robotic welding.
WeaveGenerator provides a way to quickly add a wave pattern to your weld path. Sine wave weld patterns have been shown to considerably reduce the heat transferred into the metal during a weld and create a very smooth welding arc.
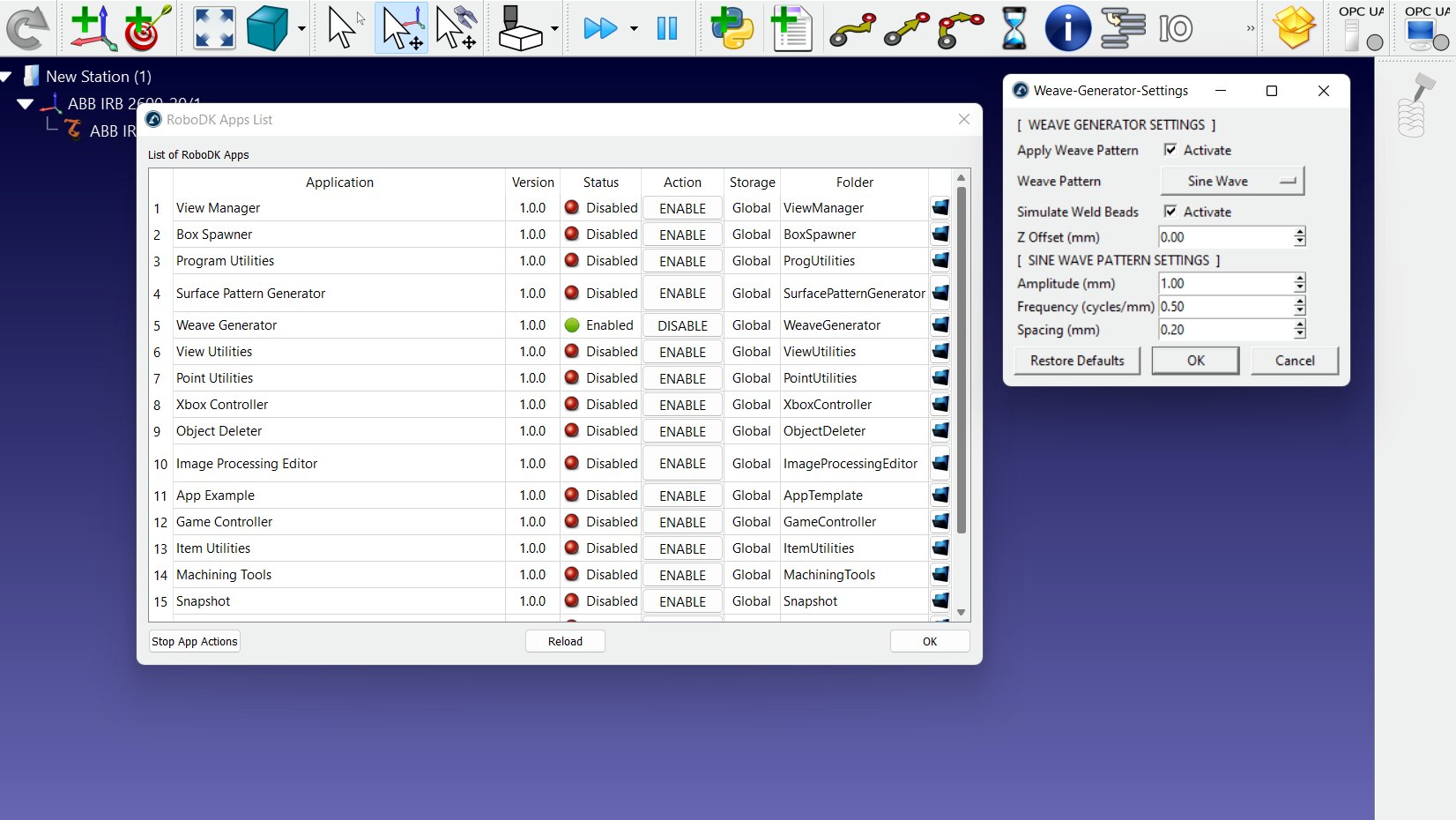
You can access the app using our App Loader interface, which is for more experimental features and those for less general use. Just activate the App Loader add-in (via the Tools menu). Then, enter the new App List that appears in the Tools menu and enable WeaveGenerator.
9. Get Advanced CAD/CAM with BobCAD-CAM Plugin
Another feature we announced earlier this year was our integration with the popular CAD/CAM package BobCAD-CAM.
This new plugin makes robotic machining even easier than before if you are a user of BobCAD. It allows you to create complex machining paths and send them directly to your robot.
10. Autonomous Guided Vehicles (AGVs) Join the Mix
Most of the robots that our users’ program with RoboDK are industrial arms – which could be 6 DoF manipulators, SCARA robots, Delta robots, and others. Well, all of that is about to change.
We recently added the ability to simulate our first Autonomous Guided Vehicle (AGV) robot, the Omron LD-60. This opens up RoboDK to more complex robot applications that include mobile robots even if this option doesn’t include offline programming. This means that you can simulate them, program them in RoboDK to make them move, but not export the code to a “real” AGV.
However, the simulation allows you to test the feasibility of your robotics project and validate the interaction of a 6-axis robot with an AGV for example.
As you can see, we had a lot of great updates and additions to RoboDK. Now that it’s 2023, we’ve got even more improvements and features planned to make our software even more useful for our users.
If you’re as excited as we are about the new updates that we have in store, keep your eye on this blog!
What features would you like to see added to RoboDK? Tell us in the comments below or join the discussion on LinkedIn, Twitter, Facebook, Instagram, or in the RoboDK Forum.. Also, check out our extensive video collection and subscribe to the RoboDK YouTube Channel