One concept that’s often misunderstood in robotics is “singularity.” There are 2 types of singularity that relate to robotics, but they both mean very different things.
When you hear someone talking about singularities and robotics, it’s important to be clear about what they are talking about. Otherwise, you will talk at cross purposes and not understand each other.
For example, an academic professor or engineer in mechatronics might only talk about kinematic singularities. They might view the other type as being “trivial” or fanciful. On the other hand, a professor in robotic ethics or a journalist might be far more interested in the “technological” or “robotic singularity” and its impact on humankind.
What does “singularity” mean in terms of robotics?
Which of the 2 types should you care about?
And why are singularities so worrying?
Here’s a clear comparison of the two concepts.
What is a Singularity?
In the most simple terms, a singularity is a condition where mathematical or systematic rules “misbehave.” For instance, when the mathematical equations used to describe the normal functioning of a system break down. At this point, the system stops performing as it is intended to perform.
Singularities are a frequent occurrence in physics. This is because math is precise, whereas the physical world is not.
For example, a black hole is a point in the universe where, mathematically, there should be an infinite gravitational pull — a singularity. We don’t know if this is really true (if there is infinite gravity) because we’ve never been into a black hole to measure the gravity in one.
A closer-to-home example would be the plug in your bathroom sink (or any other sink). Mathematically, the water should move infinitely fast at the center of the plug hole — a singularity. But water can’t move infinitely fast, so the math breaks down at this point.
Robot Singularity vs Kinematic Singularity: The Basics
In robotics, we talk about two types of singularity: the robot (or technological) singularity and kinematic singularities.
The robot singularity, or technological singularity, refers to a situation where robots and artificial intelligence becomes so sophisticated that they surpass or become indistinguishable from humans. At this time, the “rules” or laws of life and society break down and a new reality is created.
A kinematic singularity refers to a particular location in a robot’s workspace that causes it to lose one or more degrees of freedom, thus restricting its movement. This happens because the math that controls the robot requires one of its joints to move infinitely fast or become infinitely stiff.
Why is it important to know the difference? By understanding both of these important concepts in robotics, you can make better use of robotic technology and make more informed decisions about robot usage.
The Robot Singularity: When Robots Take Over
“The robot singularity,” is a common nickname for the more correctly termed “technological singularity,” or “AI singularity.”
The robot singularity is a hypothetical point in time where technology advances so rapidly that it becomes unimaginably complex. At this time, all our existing models and frameworks for living our life break down. We would have to create an entirely new way of existing in the world, probably governed by the technology itself.
It’s important that we understand the implications of the robot singularity because of its ethical implications. Theoretically, the singularity could happen very quickly with little to no warning. So we need to be conscious of such effects when we are designing any advanced technology.

What Are the Implications of the Robot Singularity?
The shift in technology that leads to a technological singularity could lead to significant changes in our way of life.
The time after the robot singularity happens has been termed the “posthuman era.” The implication is that it would not only redefine how we interact with technology, but it would also redefine what it means to be human.
If we don’t discuss the implications of this theoretical singularity, we could stumble blindly into it. By then, it would be too late to avoid it.
Some commentators believe that the “tipping point” that will lead to the singularity is already here. With artificial intelligence now permeating almost every industry, this is important to consider.
Kinematic Singularities: When Robots “Move Weird”
Kinematic singularities are much more mundane. However, they are arguably more useful for most robot users to understand.
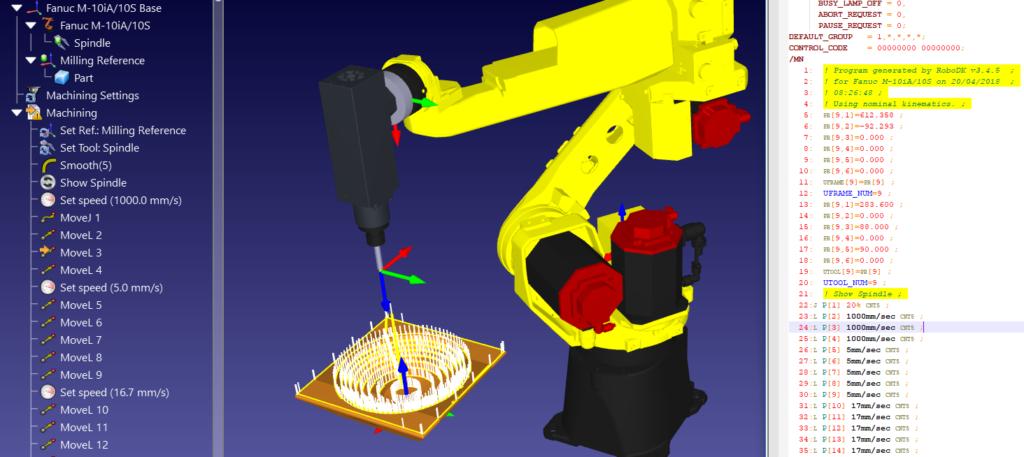
A kinematic singularity occurs when the forward or inverse kinematic equations of a particular robotic system become uncoupled. This means that the direct relationship between joint positions and end effector position doesn’t exist anymore. In other words, if a joint angle is changed, it doesn’t affect the position of the end effector in the correct way.
When your robot moves into or near a kinematic singularity, it will behave unusually. Sometimes it will get stuck, requiring you to manually move it away from the singularity. Other times, the robot will slow down or make a strange motion.
It’s important to understand kinematic singularities because they can mess up your robot programming.
What Are the Implications of Kinematic Singularities?
There can be wide-reaching implications of kinematic singularities on your robotic applications.
The most obvious implication is that your robot’s motions can become unpredictable. This can cause the robot to perform the job badly, ruining the product or creating dangerous situations that affect worker safety.
Singularities can also make robot programming more difficult. If you can’t be certain that your robot will behave as intended, how can you trust it with your important job?
One practical example is robot welding. If a robot passes through a singularity when welding, it could slow down or speed up, creating a pool of excess weld or reducing the strength of the weld. You can find out more in our article 5 Tips to Avoid Singularity Problems in Robot Welding.
Which Robot Singularity Should You Care About More?
We robotics engineers are often very practical people. If you talk to many roboticists about the “worrying technological singularity,” it’s common for them to write off your concerns as being sensationalist. They might say that you have been watching too many science fiction movies.
On a day-to-day basis, kinematic singularities are more important and more useful for robot users. They directly affect how your robot functions for particular tasks.
But both types of singularity are important.
Sure, the ethical questions around technological singularity may just be an interesting philosophical discussion. But it’s a discussion that we all need to have, every so often, to remind us to be intentional about how we design and use robots.
In short, most of the time, you should care more about kinematic singularities. But don’t forget about the technological singularity.
What questions about the robot and kinematic singularity has this article raised for you? Tell us in the comments below or join the discussion on LinkedIn, Twitter, Facebook, Instagram, or in the RoboDK Forum.. Also, check out our extensive video collection and subscribe to the RoboDK YouTube Channel